
AN3453
Sensored 3-Phase BLDC Motor Control Using Sinusoidal
Drive
Introduction
Author: Aldrin Abacan, Microchip Technology Inc.
The sinusoidal current drive has been the one of the most used methods in industrial applications for driving BLDC
motors. Compared to the six-step commutation (trapezoidal drive), the sinusoidal current drive provides higher
efficiency, lower torque ripple and lower acoustic noise. It is the preferred option by users for low-speed and low-
noise motor control systems. For practical applications, both the maintenance and implementation cost are also a
consideration in choosing the right motor type and motor controller.
This application note describes how to implement a sinusoidal current drive on a sensored 3-phase BLDC motor
setting, using a low-cost 8-bit microcontroller. By using Microchip’s Core Independent Peripherals (CIPs), the
sinusoidal current drive functions with less processing from the CPU, by reducing the complex firmware mathematical
operations required. This application note also highlights the use of the Direct Memory Access (DMA) peripheral to
move data from a Sine Look-up Table (LUT) to the PWM peripherals, using unused CPU cycles. By implementing
these functions, the CPU gains additional bandwidth to handle other system processes. Figure 1 shows the basic
block diagram of implementing sinusoidal current drive using PIC18-Q43 family devices.
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 1
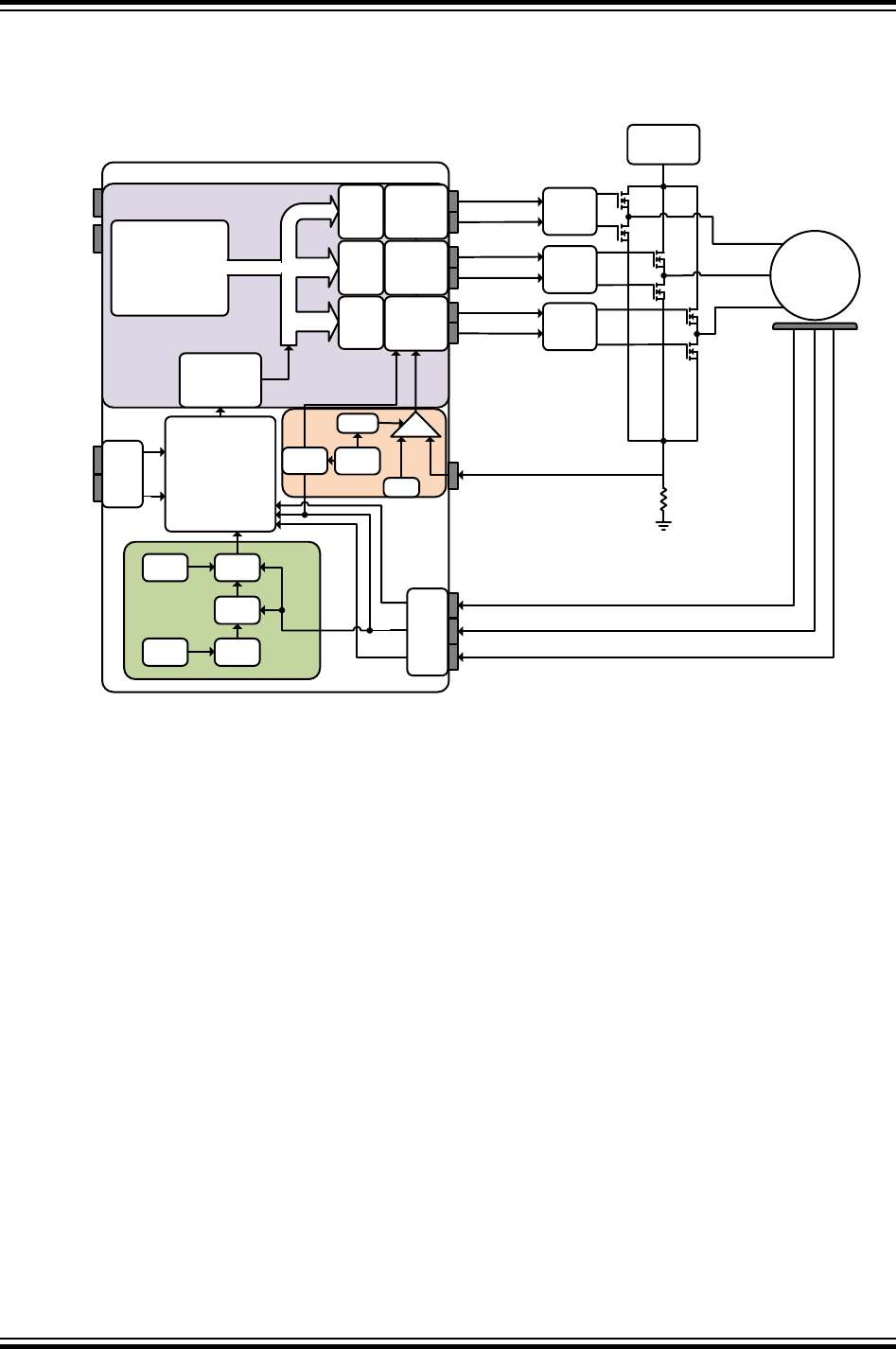
Figure 1. 3-Phase BLDC Motor Control Block Diagram
PIC18FXXQ43
GPIO
S1
(STOP/START)
VDD
VSS
Current Sense
DAC
Hall A
Hall B
Hall C
GPIO
C1
+
-
CWG1
CWG2
CWG3
PWM1
PWM2
PWM3
Program Flash
Memory
(SINE Look Up
Table)
Over-
current
detect
Hall Signals
TMR4 CLC1
TMR3
CCP1TMR1
FIRMWARE
HLT
CWG1A/PWM1H
CWG1B/PWM1L
CWG2A/PWM2H
CWG2B/PWM2L
CWG3A/PWM3H
CWG3B/PWM3L
S2
(CW/CCW)
TMR0
TMR6
DMA
Controller
3-Phase
BLDC
Motor
Phase A
Phase B
Phase C
Half
Bridge
Driver
Half
Bridge
Driver
Half
Bridge
Driver
Vmotor
Stall
detect
AN3453
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 2

Table of Contents
Introduction.....................................................................................................................................................1
1. Overview................................................................................................................................................. 4
2. Sinusiodal Drive - Sensored BLDC Motor Principle................................................................................ 5
2.1. BLDC Sensored Operation...........................................................................................................5
2.2. Sinusoidal Current Drive.............................................................................................................. 5
3. Angular Position Detector....................................................................................................................... 8
4. Drive Signal Generator..........................................................................................................................10
5. Fault Detection Control......................................................................................................................... 13
5.1. Overcurrent Protection............................................................................................................... 13
5.2. Stall Detection............................................................................................................................ 13
6. Firmware Implementation......................................................................................................................15
6.1. Button Controls...........................................................................................................................16
6.2. Motor Start-up............................................................................................................................ 16
6.3. Interrupt Sources........................................................................................................................16
7. Sinusoidal Drive 3-Phase BLDC Performance......................................................................................20
7.1. CWG Drive Signals for 3-Phase BLDC...................................................................................... 20
7.2. Phase Voltage and Line Current................................................................................................ 20
8. Conclusion............................................................................................................................................ 22
9. Appendix A Schematics........................................................................................................................ 23
10. Appendix B: MPLAB
®
Code Configuration (MCC) Peripheral Configuration........................................ 24
11. Appendix C Source Code Listing.......................................................................................................... 28
The Microchip Website.................................................................................................................................29
Product Change Notification Service............................................................................................................29
Customer Support........................................................................................................................................ 29
Microchip Devices Code Protection Feature................................................................................................ 29
Legal Notice................................................................................................................................................. 29
Trademarks.................................................................................................................................................. 30
Quality Management System....................................................................................................................... 30
Worldwide Sales and Service.......................................................................................................................31
AN3453
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 3

1. Overview
In this application, the implementation of the sinusoidal current drive on PIC18-Q43 can be divided into three
functions; Drive Signal Generator, Angular Position Detector and Fault Detection Control. The drive signal generator
provides the necessary signals for the implementation of the sinusoidal current drive. The drive signals produced in
this stage are connected to an external MOSFET driver, which is used to directly drive the BLDC motor. The drive
signals are used in gating the power supply to provide modulated voltage. The angular position detector provides
periodic interrupts based on the motor angular position. These interrupts are used to trigger a change in drive signal
applied voltage. The Fault detection controller monitors events such as overcurrent condition and stall condition.
Once a Fault is detected, the controller disables the drive signal generator and all the interrupts, which stops the
motor from running. The following are the list of peripherals used to successfully perform these functions.
• Drive Signal Generator
– Direct Memory Access (DMA) controller
– Complementary Waveform Generator (CWG)
– 16-Bit Pulse Width Modulation (PWM)
• Angular Position Detector
– TMR1/3/4
– Configurable Logic Cell (CLC)
– Compare (CCP)
• Fault Detection
– Digital-to-Analog Converter (DAC)
– Comparator (CMP)
– TMR0/2/6
Figure 1-1. Control Diagram
3-Phase
BLDC
3-Phase
Motor
Driver
Fault Detection
Feedback Hall Sensor
Position and Signal
Period
Drive
Signal Generation
Driver Shutdown
Controls
State/Direction
Sinusoidal Data
(LUT)
Set Source Address
Hall
Sensor
Bus Current Signal
Stall
Motor Angular Position
Detection
6-State Logic
Figure 1-1 shows the functional block diagram of the 3-phase BLDC motor operation. Input control signals are
available for stop/go commands and direction control. These input controls determine when the motor will rotate and
the commutation sequence the drive signal generator will follow. The sinusoidal data provides PWM duty cycle values
stored on Programmable Flash Memory (PFM), which will be loaded to the drive signal generator, depending on the
rotor position. The motor used in this application is DMB0224C10002, which has a built-in Hall effect sensor as
feedback for the motor position.
AN3453
Overview
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 4

2. Sinusiodal Drive - Sensored BLDC Motor Principle
This application note focuses on the implementation of sinusoidal current drive operation on a 3-phase BLDC, using
an 8-bit PIC
®
MCU. Hall effect sensors are used as feedback to identify the rotor position, which is required for the
BLDC driving algorithm. For a more detailed explanation of BLDC motor control fundamentals, refer to AN885: BLDC
Motor Fundamentals.
2.1 BLDC Sensored Operation
Identifying the rotor position is an important aspect in BLDC motor control. The rotor position is used to determine the
proper electronic commutation. The most common method of identifying rotor position in a BLDC motor is by using
Hall effect sensors. Hall effect sensors are sensing switches that produce logic level, based on the detected magnetic
field. As the motor rotates, the Hall effect sensors identify the position information of the magnet poles (positive or
negative polarity) installed in the motor, sending it to the controller. In this application, three Hall effect sensors are
pre-installed inside the motor. These Hall sensors are distributed equally around the stator (120° apart) in a way that
its output can generate six different combinations in one electrical cycle, which changes for every 60° of movement.
These combinations can be translated into a number from one to six, which are represented by three binary digits.
These sensors are positioned in a way that the magnets' polarity will change even before the rotor is in the position
for the next commutation, preventing the rotor from being stuck.
The number of electrical cycles in one complete revolution is based on the number of pole pairs the motor has, as
shown in Figure 2-1. Since a 5-pole pair motor is used in this application, a total of five electrical cycles is needed to
complete one mechanical revolution (one rotation). Also, it is known that the Hall sensor will change states every
electrical cycle and by measuring the time between each state change, the angular velocity or motor speed can be
obtained.
In this application, the microcontroller counts the number of system clock ticks that is accumulated during a Hall
period or an electrical cycle, using a series of timers. The number of clock ticks in a Hall period represents the speed
of the motor, which means that the speed of the motor in clock ticks is five times the number of system clock ticks on
a Hall period. This information can be used to subdivide the Hall period into smaller intervals for the rate of changing
the applied voltage to the driver, which is vital to the sinusoidal current drive or simply measure its current speed.
Figure 2-1. Relationship between Hall Sensor Signal, Electrical Cycle and Mechanical Revolution
HALL A
HALL B
HALL C
0°
60°
120° 180° 240°
300°
300°
0°
60° 120° 180° 240° 300°
0°
60° 120° 180° 240° 300°
0°
60° 120° 180° 240° 300°
0°
60° 120° 180° 240°
300°
360°
1 Mechanical Revolution
Electrical
Cycle
1 Electrical Cycle 1 Electrical Cycle 1 Electrical Cycle 1 Electrical Cycle 1 Electrical Cycle
2.2 Sinusoidal Current Drive
The basic premise of the sinusoidal drive is to provide each motor winding with currents that vary sinusoidally, based
on the rotor position. These currents are phase-shifted by 120° from each other, relative to its corresponding Hall
sensor. In BLDC motor control, the drive signals that are used require variable voltages that change with respect to
the speed and position of the motor. This variable voltage is applied using the PWM technique. By providing sinusoid-
based signals through the PWM modules to the MOSFET driver, the current is generated on each motor windings.
Due to the gradual changing of the applied voltage, the sinusoidal drive's torque ripple is somehow lower in
comparison with the trapezoidal drive.
AN3453
Sinusiodal Drive - Sensored BLDC Motor Princip...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 5

In this application, the sinusoidal current drive is applied using data extracted from the Space Vector Pulse-Width
Modulation (SVPWM) technique. This technique is widely used for digital implementation because of its higher
efficiency and more sophisticated algorithm, over regularly applying an individual sinusoidal signal to the motor
windings.
The SVPWM method is a vector-based scheme used in three-phase systems, such as motor control applications.
Rather than producing pure sinusoid waveform from the drive signals for each motor terminals with respect to
ground, SVPWM generates three sinusoidal line-to-line voltage (differential voltage) between two terminals. A space
vector representation is created, where the spaces between unit vectors are separated by 60.0° correspond to every
state in an electrical cycle, as shown in Figure 2-2. Each desired voltage can be simulated by adding the components
of two adjacent active vectors and null vectors represented by the 000 and 111 logic states (located at the origin).
The resulting desired voltage is represented by the manipulated duty cycle of PWM peripheral.
Table 2-1 provides the equation for the PWM switching time for each sector. Once the approximate angular position is
identified, the resultant vector magnitude is calculated, with respect to the adjacent voltage space vectors and null
vector T0, T1 and T2 representing conduction time within a period. The values for T1 and T2 are taken from a Look-
up Table containing 172 fractional sinusoidal values from 0° to 60°.
Table 2-1. Equations for PWM Switching Time by each Sensor
Sector Switching Time Equation
1 PWM1 = T1 + T2 + T0/2
PWM2 = T2 + T0/2
PWM3 = T0/2
2 PWM1 = T1 + T0/2
PWM2 = T1 + T2 + T0/2
PWM3 = T0/2
3 PWM1 = T0/2
PWM2 = T1 + T2 + T0/2
PWM3 = T2 + T0/2
4 PWM1 = T0/2 P
PWM2 = T1 + T0/2
PWM3 = T1 + T2 + T0/2
5 PWM1 = T2 + T0/2
PWM2 = T0/2
PWM3 = T1 + T2 + T0/2
6 PWM1 = T1 + T2 + T0/2
PWM2 = T0/2
PWM3 = T1 + T0/2
AN3453
Sinusiodal Drive - Sensored BLDC Motor Princip...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 6

Figure 2-2. SVPWM Representation in an Orthogonal Plane
I
II
III
IV
V
VI
100
110
010
011
001
101
000
Ɵ
60.0°
V1
V2
Vr
111
The approximate PWM output from SVPWM, with respect to its angular position, is plotted in Figure 2-3. The
waveform produced has a shape of a saddle due to the third harmonic injection by SVPWM. Each PWM output is
shifted 120° from each other. The angular position is scaled from 360° to 192 for more convenient implementation in
this application. To reduce switching loss, each of the three phases do not switch for one-third of the time in a cycle.
Figure 2-3. SVPWM Voltage Waveform Representation
AN3453
Sinusiodal Drive - Sensored BLDC Motor Princip...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 7

3. Angular Position Detector
The angular position of the rotor is vital to produce waveforms that are synchronized to the motor during the
application of sinusoidal current drive. Hall effect sensors provide limited information since it can only detect the
approximate position in an electrical cycle. To apply the sinusoidal current drive to the BLDC motor, a constant
change in applied voltage to the MOSFET driver is required, based on the exact rotor position. In this application, a
motor angular position function is designed to convert the Hall signal into equally smaller signals that represent a unit
angle of rotation. It subdivides the Hall signal into smaller intervals where it acts as a trigger to change the applied
voltage at a certain time and position. Several peripherals, such as timers and CCP, are used to create this function.
The basic idea of this method is to count the number of system clock ticks it takes to complete a Hall period and
divide it to the number of units desired for the next period, assuming that it has the same clock tick count. Since it is
basically a hardware division, there will possibly be remainder clocks in the calculations. These remainder clocks will
be added to the last degree/phase of the period, especially when using a slower clock source. To reduce such errors,
a faster clock source is used. In this design, a 16 MHz clock is used. Figure 3-1 shows the block diagram of the
implemented motor angular position scheme.
Figure 3-1. Motor Angular Position Detective Scheme Block Diagram
CLK (16 MHz)
TMR0
TMR3
CCPTMR1
Interrupt
Hall Signal
R
R
Capture and
COPY TMR3
register
HALL
CCPout
1 2
190 191 192
Set Desired # of
division(PR)
Overflow
Match TMR1 and
Compare Value
The period register of the TMR4 is used to set the desired number of divisions per Hall signal period. Since the
number of arrays declared is six with 32 elements each, the number of divisions set in T4PR is 192.
TMR3 does not have a direct input connection from the TMR4 Overflow bit. By using CLC as a buffer, the TMR4
output is rerouted to the TMR3 input. It will continuously increment until the reference edge of the Hall signal is
detected. Once the reference edge is detected, the value in the TMR3 register is copied to the CCP compare value,
which can also be calculated using Equation 3-1. For example, a 200 Hz Hall signal takes 80,000 clock ticks. Since
AN3453
Angular Position Detector
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 8

each TMR3 increment takes 192 clock ticks, the TMR3 counter would have registered a value of 416, when the Hall
sensor edge is detected. The value is copied to the CCP Compare register, which is continuously compared to the
TMR1 register. TMR1 shares the same clock source as TMR4, which is a 16 MHz clock. If matched, a CCP interrupt
will occur to reload the TMR1 register and signals the DMA to increment the source address for the next PWM value.
For the MCC configuration, the TMR4 register requires a time-based period and not a register value. It can be
calculated using Equation 3-2. T4TMR is an 8-bit register that can store 255 values. Each clock cycle increments the
T4TMR until it matches the T4PR. The clock source used is F
OSC
/4 of 64 MHz clock.
Equation 3-1. Compare Value Calculation
=
×
Equation 3-2. TMR4 Period Calculation Based on Desired Number of Interrupts
4
=
+ 1
4
=
192 + 1
16
= 12.062
μ
AN3453
Angular Position Detector
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 9

4. Drive Signal Generator
The sinusoidal data is divided into six arrays for the DMA controller to easily point its address as the source, as
shown in Figure 4-1. The three windings require the same signal, phase-shifted by 120°, therefore a single set of
sinusoidal data can be used.
Figure 4-1. Sinusoidal Data Look-Up Table
Each array consists of 32 16-bit elements. These arrays are stored in the Program Flash Memory (PFM) of the MCU.
Using the DMA controller, the address of the first element is set as the DMA source address. The data is transferred
from the PFM to the PWM Duty Cycle register, which is set as the DMA destination address. The DMA controller
requires the size of the destination address to be a multiple of the source address size and vice versa. The
DMAxDSZ register determines the destination size, while the DMAxSSZ register determines the size of the source.
The PWM Duty Cycle register is a 16-bit register, which makes the value of the DMAxDSZ register equal to 2 bytes.
The value of DMAxSSZ depends on the array size stored in the PFM. It can be calculated using Equation 4-1.
Equation 4-1. DMAxSSZ Register Value
= × #
There are two events that access or modify the settings of the DMA controller; one is during Hall state transition, and
the other is during motor angular position interrupt. When a Hall state change is detected, the DMA controller source
address register is loaded by the firmware, depending on both the sector position and direction. Changing the
AN3453
Drive Signal Generator
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 10

addresses during operation requires enabling and disabling the DMA channel on the run. A lock and unlock
sequence is required to do this. On the other hand, the motor angular position interrupt triggers the DMA controller to
increment the DMA source address, pointing to the next element on the array until all elements have been loaded to
the destination or another Hall state change is detected.
Each DMA channel's destination address is pointed to the PWM slice register where the variable voltage is set. The
switching frequency for motor control applications depends on the motor's inductance. If the motors current can
change at a fast rate, the switching frequency should be high enough to avoid core saturation. In this application, the
switching frequency was set to 40 kHz, catering the need to provide high frequency and high resolution for motor
operation. Equation 4-2 shows the calculation of the PWM period, in reference to the frequency selected. The
sinusoidal data that is used in this application are duty cycle values, based on the PWM resolution and PWM period,
which can be calculated using Equation 4-3. Center-Aligned mode is selected to produce two pulses line-to-line in
each period. By doing this, the ripple current is reduced while not increasing the switching loss in power devices. The
PWM registers are double-buffered. It requires an external source or LD bit to be triggered. In this application, DMA is
used as an external load event. Every time the DMA channel successfully transfers a message, a request to load is
made. The buffer updates every other request.
Equation 4-2. PWM Period Register Value in Center-Aligned Mode PWM
=
ℎ
×
× 2
=
64
40
× 1 × 2
1 = 799 = 0
31
Equation 4-3. PWM Duty Cycles Register Value
1
1 =
×
%
100
To drive the three-phase motor with sinusoidal currents, the CWG peripheral is used. The MOSFET driver of the
three-phase BLDC motor consists of three half-bridges, one for each motor terminal. Each half-bridge consists of two
switches, which require complementary PWM signals. Because of this, the CWG modules are configured in Half
Bridge mode, where each generates two output signals that resemble the true and inverted versions of the input
PWM. The CWGxA input is configured for the high-side switches, while the CWGxB input is configured for the low-
side switches of the driver. Figure 4-2 shows the CWG output representation for each half bridge.
AN3453
Drive Signal Generator
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 11

Figure 4-2. CWG Output
CWG1A
CWG2A
CWG3A
CWG1B
CWG2B
CWG3B
Since power MOSFETs take a finite amount of time to switch on or off, there may be a time where both switches of a
half bridge turn on. It creates a low resistance path from the source to the ground that could cause a short circuit.
This event is called shoot-through. In CWG, a dead-band delay is inserted to prevent shoot-through current during an
output level transition. Dead-band delay is a time delay inserted between the switch transition to prevent conduction
of high and low-side switches at the same time. Dead-band delays can be inserted in the rising or falling edge of the
input source. Dead-band counters are set on CWGxDBR and CWGxDBF registers.
AN3453
Drive Signal Generator
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 12

5. Fault Detection Control
Fault detection control is implemented within this system to stop motor operation when an event that might cause
motor drive failure is detected. To avoid a false trigger, each detection unit should be enabled a fraction of a second
after the motor start-up, using TMR0.
5.1 Overcurrent Protection
If the circuit draws more than the maximum allowable current caused by commutation failures, excessive load or
internal faults, etc., the circuit might experience overheating or system failure. To prevent such conditions, an
overcurrent detection is used. Overcurrent detection is implemented by monitoring the bus current of the 3-phase
MOSFET driver. Resistor R
SHUNT
is tapped at the low side of the motor driver. The voltage across R
SHUNT
represents
the current that flows through the driver, since the voltage is directly proportional to the current across the resistor.
The bus current can be computed using Equation 5-1.
Equation 5-1. Bus Current Calculation
=
×
The shunt resistor’s voltage is continuously compared to the reference voltage provided by the MCU. During motor
runtime, the bus current is sampled by the comparator (CMP) input. Every 50 ms, the comparator output voltage is
monitored, to verify whether it exceeds the reference voltage set in the DAC. If the comparator output is high, the
CWG peripheral will be disabled and stop the motor. During motor start-up, a high current is drawn by the motor
before it stabilizes. This might cause a false trigger and stop the motor. To prevent this situation, a 500 ms delay after
start-up is inserted before enabling the fault detection unit.
5.2 Stall Detection
The motor Hall sensor provides a stable periodic signal in the form of pulses, when the motor is running. The
absence of these pulses over a long period indicates the motor has stopped or is in a Stall condition. This condition
normally happens when the motor load torque is greater than the motor shaft torque. During a Stall condition, the
motor draws current that exceeds the rated value, which also causes motor overheating and failure.
Figure 5-1. HLT Operation
Regular
Hall
operation
Hall’s stall
condition
CLOCK
COUNTER
1 2 3 4 5 . . . X
PR = X
Abcense
of pulse
TMR2IF
Counter matches with
PR
To detect such a condition, a stall detection feature is also implemented. By using the Hardware Limit Timer (HLT) of
the TMR2 peripheral, the absence of a Hall signal within a period of time, can be detected. It is set to operate in
rollover Pulse mode. In this mode, an input signal is allowed to clear the TMR2 register every time a falling edge
transition is detected. When the pulse is absent or has a long periodic time, TMR2 will continuously increment until it
reaches its maximum value, setting its Overflow bit. HLT will trigger an interrupt that disables all CWG peripherals,
stopping the motor. In this application, the Hall B signal, which is connected to the RC6 input, is used as the
reference signal. The signal provided by the Hall sensor has an approximate period of 5 ms in a normal setup. If the
timer counter matches the PR value, the interrupt flag will be set as shown in Figure 5-1. The PR value that will be
set on TMR2 should be larger than the period of the Hall sensor signal, in order to identify the stall condition of the
motor. To calculate TMR2 PR register values, use Equation 5-2.
AN3453
Fault Detection Control
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 13

Equation 5-2. PR2 Calculation
2 =
2
×
×
AN3453
Fault Detection Control
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 14

6. Firmware Implementation
The state diagram in Figure 6-1 illustrates the motor control system and its interaction with each interrupt service
available in the system. The firmware basically revolves on the state of the motor, whether it is in the Running
condition or in Stop condition. Flags are used to identify the state of motor operation. From Reset, all peripherals and
variables are initialized while keeping interrupts disabled. The motor is initially set in a Stop state and in a CCW
direction. For the complete source code, refer to Appendix C: Source Code Listing.
Figure 6-1. Motor Control State Diagram
Motor
Running
Reset
Initialize
Peripherals
and Variables
Motor
Stopped
Enable
Interrupts
Startup
Routine
(trapezoidal)
Get Current
Sector
Get Current
Sector
Get Current
Sector
Reload Counter for
angular position(DMA
address increment in
the background)
Set DMA
Address
Set compare
Value for
angular
position
Disable signal
generator,
Disable
Interrupts
Enable Signal
Generator
Toggle
Direction Flag
Set DMA
address
Set DMA
address
Reload
Counters
associated
with angular
position
Check
Direction
Check
Direction
Check
Direction
Check CMP
output
The device used in this application is PIC18F47Q43. It contains 8192 bytes of data memory, 131,072 bytes of
program memory and 2048 bytes EEPROM. The application uses 94 bytes (1%) of its data memory and 7,190 bytes
(5%) of program memory. EEPROM is not used in this application.
AN3453
Firmware Implementation
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 15

6.1 Button Controls
Two buttons are used as input to trigger the start/stop operation and CCW/CW direction. Both input buttons are
continuously monitored after initialization as shown in Example 6-1. When switch S1 is pressed, it checks the motor
state if it is in running or stall state. If it is in a Stall state, the RunMotor() subroutine will be called enabling CWG,
Interrupt routines and CCP. If the motor is in running state and switch S1 is pressed, StopMotor() subroutine will
be called disabling CWG, Interrupt routines and CCP, toggling the motor condition flag.
Example 6-1. Program Main Loop
while (1) {
// wait until an action is detected
CheckTriggerButton();
CheckDirectionButton();
}
Switch S2 toggles the direction flag. When S2 is pressed during a motor Stop condition, it will simply change the
direction flag from CCW to CW, or vice versa. By toggling the direction flag, the commutation order based on the
sinusoidal data array during Hall transition is changed. If S2 button is pressed in running condition, the motor is
forced to stop before changing the commutation sequence. Once the direction flag is toggled and the position is
identified, the motor will start running again.
6.2 Motor Start-up
The motor’s initial speed from a Stop condition is zero. This makes the application of sinusoidal current drive difficult
since there is no reference speed available. In this application, a low-speed trapezoidal drive is used as the starting
commutation until the motor stabilizes for the sinusoidal drive. The trapezoidal drive is executed by configuring the
CWG peripherals to Steering mode. Each time a Hall transition is detected, the PWM signal is steered to the output
pin based on the 6-step drive table stored in program Flash, as shown in Figure 6-2. Each drive table array contains
six elements based on the six states of Hall sensor logic. As the motor starts to turn, the PWM duty cycle is increased
gradually until it establishes speed and completes a mechanical revolution.
Figure 6-2. Trapeziodal Look-Up Table
By the time it completes a mechanical revolution, the CWG peripherals are changed to Half-Bridge mode for the
preparation of transition to sinusoidal drive. The timers used on angular transition are all reloaded and the functions
on IOC ISR are changed with respect to sinusoidal function.
6.3 Interrupt Sources
After initialization, only the monitoring of the input buttons is performed in the main loop. Other processes and
functions are either performed by the CIPs or triggered by interrupt resources. When a certain condition is met, an
interrupt flag is set and its corresponding Interrupt Service Routine is performed. Figure 6-3 shows how these
routines are executed.
AN3453
Firmware Implementation
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 16

Figure 6-3. ISR Flowchart
IOCC5 ISR
Identify currentSector
prevSector ==
currentSector?
END
setDMA(address1,address2
,address3)
prevSector =
currenSector
IOCC4 ISR
Identify currentSector
prevSector ==
currentSector?
END
setDMA(address1,address2
,address3)
prevSector =
currenSector
IOCC6 ISR
Identify currentSector
prevSector ==
currentSector?
END
setDMA(address1,address2
,address3)
prevSector =
currenSector
HALLB == RISING
EDGE?
Counters Reload
CCP compare value =
TMR3 counter
NO
NO
YES
YES
NO
YES
TMR2 ISR
Set Motor Stop Flag
END
TMR6 ISR
END
Disable Interrupts
Disable CWG
CCP ISR
Reload TMR1 Register
END
CMPOUT ==1?
Disable Interrupts
Disable CWG
YES
NO
NO
YES
TMR0
Enable fault detection
END
Disable TMR0
All peripherals used in the firmware are configured using MPLAB
®
Code Configurator (MCC). For the step-by-step
procedure of how all peripherals are configured, refer to Appendix B: MPLAB Code Configurator (MCC) Peripheral
Configuration.
6.3.1 Hall ISR
Each Hall sensor is connected to a digital pin of the MCU in which Interrupt-on-Change (IOC) is enabled. If a Hall
transition, either a falling or rising edge is detected, Hall ISR is called. The Hall state is represented by a 3-bit Logic
state which provides the current sector location. During start-up, the trapezoidal function is set as Hall ISR in which
the six-step commutation is executed. When a mechanical revolution is completed, the Hall ISR is replaced with the
sinusoidal function. (uint8_t) ((PORTC >> 4) & 0x07) is used since all Hall pins are located in the PORTC
register. The DMA source address that will be set is based on the currentSector0. Using the SetDMA()
subroutine, the source addresses of each DMA channel is pointed to a different set of sinusoidal data, depending on
the detected location. Each PWM module is configured with an individual transfer, utilizing three DMA channels. The
DMASELECT register should be set before configuring an individual channel. Figure 6-4 shows the CheckSector()
subroutine that is used in Hall ISR to configure the DMA channels.
AN3453
Firmware Implementation
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 17

Figure 6-4. Check Sector Subroutine
AN3453
Firmware Implementation
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 18

Hall B is also used to identify the reference speed for the motor angular position. Each time a Hall B positive edge
transition is detected, the value of the TMR3 period is copied to the CCP compare value and reloads all timers used
in motor angular position.
6.3.2 CCP ISR
Every time the Timer1 register matches the compare value register, the CCP ISR flag is set. It triggers the DMA
controller to increment the source address for the next array element to be loaded to the PWM duty cycle register.
While the DMA performs this task in the background, CCP ISR reloads the Timer1 register.
6.3.3 HLT TMR 2 ISR
If a missing Hall pulse is detected in a period of time and the PR2 matched, the TMR2 flag is set. The motor
operation is changed into a Stall state, triggering the motor to stop by calling the stopMotor() function and
disabling the interrupts.
6.3.4 TMR6 ISR
During motor operation, the current is continuously monitored by using the Comparator (CMP) peripheral. If the V- is
greater than the V+, which is set from the DAC register, the output of the comparator is set to digital high. For every
50 ms, TMR6 ISR checks the comparator output. If the CMP output is set, stopMotor() function is called, disabling
all interrupts and CWG peripherals, stopping the motor operation.
6.3.5 TMR0 ISR
During the motor start-up, the windings behave as a closed circuit, causing the system to draw high current. Referred
to as inrush current, this phenomenon might cause a false trigger on the overcurrent detector. By using TMR0, a
fraction of a second is inserted before enabling the Fault detection function. When the Timer0 flag is set, the
Comparator, TMR2 peripherals and its corresponding interrupts are enabled. The TMR0 is also disabled, making it a
one-time execution during motor running operation and will only be in service during another start-up.
AN3453
Firmware Implementation
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 19

7. Sinusoidal Drive 3-Phase BLDC Performance
To present the viability of this application, both the driving voltage signal and the motor current and voltage are
captured. Through observation, the output voltage and current of the sinusoidal drive are compared with the
trapezoidal drive.
7.1 CWG Drive Signals for 3-Phase BLDC
Figure 7-1 shows the drive signals provided to the power stage by the CWG module while in running operation.
Figure 7-1. CWG Drive Signals
CWG1A
CWG1B
CWG2A
CWG2B
CWG3A
CWG3B
CWG1A
CWG1B
CWG2A
CWG2B
CWG3A
CWG3B
Analog Representation
Digital Representation
7.2 Phase Voltage and Line Current
Figure 7-2 shows the phase voltages of the windings by the 3-phase BLDC in both sinusoidal drive and trapezoidal
drive. Three oscilloscope probes are connected to the voltage dividers of each motor winding. The difference
between the driving phase voltages can be observed. The sinusoidal drive produces a saddle shape waveform where
the switching voltage is smoothly varied. The trapezoidal drive, on the other hand, generates a trapezoidal waveform.
AN3453
Sinusoidal Drive 3-Phase BLDC Performance
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 20

Figure 7-2. Phase Voltages
SINUSOIDAL DRIVE TRAPEZOIDAL DRIVE
Using a current probe, the phase current of the trapezoidal and sinusoidal current drive is obtained and shown in
Figure 7-3. Both drive runs at 2400 RPM. Ripples are observed in trapezoidal drive. The sinusoidal drive provides a
smoother line current compared to the trapezoidal drive. Ripples are more apparent in the trapezoidal drive. The
sinusoidal drive current waveform follows a sinusoidal like pattern in which ripples and audible noise are reduced.
Figure 7-3. Phase Current
SINUSOIDAL DRIVE TRAPEZOIDAL DRIVE
AN3453
Sinusoidal Drive 3-Phase BLDC Performance
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 21

8. Conclusion
The method of using DMA to directly transfer data from the Look-Up Table (LUT) to PWM can lessen real-time
calculation in sinusoidal drive, BLDC motor control. Though lacking with speed control since the data from the LUT
cannot be modified, this method is perfect for applications that require non-speed variables and low noise
applications. By reducing the functions and instructions using the CIPs DMA controller, other tasks can be performed.
By only using a low-cost 8-bit microcontroller, PIC18-Q43, sinusoidal current drive BLDC motor operation is executed
successfully. Fault detection is also implemented to automatically stop the operation, when events that might cause
the operation to fail are detected.
AN3453
Conclusion
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 22

9. Appendix A Schematics
Figure 9-1. Schematic Diagram A
PIC18F47Q43
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20 21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40MCLR
SWITCH_S1
SWITCH_S2
CWGB
VDD
VSS
HALLA
HALLC
HALLB
CWG3A
CWG2B
VSS
VDD
CWG1B
CWG1A
C1IN2-
CWG2A
+
-
I-
I+
VREF
+
-
VREF
IMOTOR
3.3V
3.3V
SWITCH_S1
3.3V
SWITCH_S2
3.3V
4.7K
4.7K
4.7K
4.7K
10K
10K0.1uF
0.1uF
1K
1K
1K
1K
56pF
30K
30K
1K
1nF
MCP6022
MCP6022
DNP
DNP
S1
S2
12V
V
M OTOR
CWG1A
CWG1B
12V
V
M OTOR
CWG2A
CWG2B
M1
M2
12V
V
M OTOR
CWG3A
CWG3B
M3
I+
I-
10R
2R
10R
2R
10R
2R
MIC4604YM
MIC4604YM
MIC4604YM
.025R
GND
VIN
VOUT
12V
V
MOTO R
.1uF
47uF
0.1uF
MIC29150-12WT-TR
3R
3R
3R
10uF
10uF
LO
VSS
LI
HI
VDD
HB
HO
HS
LO
VSS
LI
HI
VDD
HB
HO
HS
LO
VSS
LI
HI
VDD
HB
HO
HS
100uF
CWG3A
CWG1B
CWG2A
CWG2B
CWG3A
CWG3B
1k 1k 1k 1k 1k 1k
GND
VIN
VOUT
5V
0.1uF
47uF 0.1uF
MIC39100-3.3MT
47uF
GND
VIN
VOUT
3.3V
0.1uF
47uF 0.1uF
MIC37100-3.3MT
47uF
12V
5V
M1
M3
M2
HALL A
5V
HALL B
HALL C
4.7K
47K
4.7K
47K
4.7K
47K
3-PHASE BLDC
MOTOR
5V
90K
100pF
100pF
90K
100pF
90K
3.3V
2.2uF
3.3V
2.2uF
10uF
.1uF
VOUT
3.3V
2.2uF
AN3453
Appendix A Schematics
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 23

10. Appendix B: MPLAB
®
Code Configuration (MCC) Peripheral
Configuration
In this section, the initialization and configuration of the peripherals utilized in this application note using MPLAB
®
Code Configurator (MCC) are shown. MCC is a plug-in tool of MPLAB
®
X IDE, which provides a graphical
environment where peripheral configuration can be executed. MCC generates drivers in C code, which initializes the
peripherals and provides functions that can be called on your firmware. Refer to the MPLAB
®
Code Configurator
V3.xx User's Guide (DS40001829) for more information on how to install and set up the MCC in MPLAB X IDE.
The following steps provide the MCC settings of each PIC18-Q43 peripheral used in this application note.
1. Select HFINTOSC as the clock source with a 64 MHz frequency in the system module.
2. For the Motor Angular Position, TMR4, CLC1, TMR3 CCP1 and TMR1 are configured. The clock source of
TMR4 is set to F
OSC
/4. To provide 192 interrupts in a Hall period, set the TMR4 period to 12.0625 µs according
to Equation 3-2.
3. Using the CLC1 module, the TMR4 input is redirected to TMR3 input. In the AND-OR mode of CLC1, TMR4
output is selected as input to two OR gates. This configuration acts as a buffer logic that provides input to
TMR3 clock.
4. The output of CLC1 is used as an input of TMR3. Every time the TMR4 output is set, TMR3 is incremented by
one. It is done to count the number of TMR4 period in a Hall period. Each time a Hall period is detected, the
TMR3 counter register is copied to the compare register of CCP and then reloaded with the initial value.
5. Set the CCP1 module to Compare mode. Select the TMR1 module as the timer in which the compare register
value is always compared. Select pulse clear timer as the Compare operating mode. Enable the CCP interrupt
to provide an ISR that will reload TMR1 every matching event.
6. Select F
OSC
/4 as the TMR1 clock source to perform hardware division with TMR4.
7. The drive signal generator requires that the DMA controller, PWM and CWG modules to be configured. For the
PWM module, a single slice is used for each bridge. Select HFINTOSC as the clock source for each PWM
module without a prescale value. Choose the Center-aligned mode as the operating mode. Set the requested
frequency to 40 kHz, to provide a 10-bit resolution for the duty cycle. In the register’s tab, set the PWMxLDS to
the corresponding DMA channel to automatically reload the duty cycle value to the PWM output every time the
DMA successfully transmitts an element.
8. Disable the CWG module, since the motor is initialized in a Stop condition. Set the PWMxOUT1 register as the
input source for the operation. Steering mode is selected as the Output mode since the motor starts in the
trapezoidal drive, but changes to the Half-Bridge mode during firmware execution, if motor speed is
established. The dead-band count for falling and rising events are set to 63-64 counts with the HFINTOSC
clock source.
9. The DMA controller channels are initially disabled and will be manually enabled in the firmware. Set the
DMODE and SMODE bits in the DMAxCON1 register to “incremented”. Select the program Flash memory as
the source in the DMAxCON1 register. For the DMA source address, enter the address location of the
corresponding PWM slice register. In MPLAB
®
X IDE, the address of the register can be easily identified by
clicking Window > Target Memory Views > SFR. An SFR tab will pop up showing a list of registers and their
addressess. Set the DMAxDSZ register to 2, since the PWM duty cycle register has a 2-byte size. For the
source address size, set 0x40 to the DMAxSSZ register. CCP1 is selected as an interrupt request source in
the DMAxSIRQ register.
10. For the Fault detection feature, TMR0 is used to insert a delay before enabling Fault detection. Set the clock
Prescaler to 1:32 and the Postscaler to 1:10. Set the clock source to LFINTOSC. Set the requested period to
the desired delay sequence, before enabling the Fault detection features, which is 500 milliseconds. TMR0 is
initialized as disabled, since the time set will start upon the motor running state.
11. Set the DAC output value to 2.5V. For the positive and negative reference, choose V
DD
and V
SS
, respectively.
Disable the DAC output in the DACOUT1 register. The positive input of the CMP module uses the DACOUT1
as the reference voltage. Choose the CIN2- as the negative input of the CMP module. Select the inverted
output polarity to provide an output high when the negative input is greater than the DACOUT value. Using
TMR6, the comparator output is checked every 50 ms. If the CMP output state is high, a trigger will stop the
motor. To apply this scheme, enable the TMR6 interrupt and select LFINTOSC as the clock source. Change
the Prescaler value of TMR6 to 1:64 and set the timer period to 50 ms.
12. For stall detection, TMR2’s HLT mode is used. Choose the T2CKIPPS pin as the external Reset source to use
the Hall B signal to detect a Stall condition. Choose “resets at rising TMR2_ers” as a Start/Reset option to
AN3453
Appendix B: MPLAB
®
Code Configuration (MCC) ...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 24

reset the timer every time the Hall signal is detected before the TMR2 flag is set. For the TMR2 period,
indicate the time in which, if no Hall signal is detected, it will trigger an interrupt. Enable TMR2 interrupt.
13. Configure the output and input pins for the peripherals as shown in Figure 10-1.
AN3453
Appendix B: MPLAB
®
Code Configuration (MCC) ...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 25

Figure 10-1. Pin Manager and Pin Module Configuration
AN3453
Appendix B: MPLAB
®
Code Configuration (MCC) ...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 26

After setting all peripherals needed, click the “Generate code” in the resource management tab. It will generate
peripheral drivers and a main.c, where all peripherals are initialized based on your configuration.
AN3453
Appendix B: MPLAB
®
Code Configuration (MCC) ...
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 27

11. Appendix C Source Code Listing
The latest software version can be downloaded from the Microchip website (www.microchip.com). The user will find
the source code appended to the electronic version of this application note.
AN3453
Appendix C Source Code Listing
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 28

The Microchip Website
Microchip provides online support via our website at http://www.microchip.com/. This website is used to make files
and information easily available to customers. Some of the content available includes:
• Product Support – Data sheets and errata, application notes and sample programs, design resources, user’s
guides and hardware support documents, latest software releases and archived software
• General Technical Support – Frequently Asked Questions (FAQs), technical support requests, online
discussion groups, Microchip design partner program member listing
• Business of Microchip – Product selector and ordering guides, latest Microchip press releases, listing of
seminars and events, listings of Microchip sales offices, distributors and factory representatives
Product Change Notification Service
Microchip’s product change notification service helps keep customers current on Microchip products. Subscribers will
receive email notification whenever there are changes, updates, revisions or errata related to a specified product
family or development tool of interest.
To register, go to http://www.microchip.com/pcn and follow the registration instructions.
Customer Support
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Embedded Solutions Engineer (ESE)
• Technical Support
Customers should contact their distributor, representative or ESE for support. Local sales offices are also available to
help customers. A listing of sales offices and locations is included in this document.
Technical support is available through the website at: http://www.microchip.com/support
Microchip Devices Code Protection Feature
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today,
when used in the intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these
methods, to our knowledge, require using the Microchip products in a manner outside the operating
specifications contained in Microchip’s Data Sheets. Most likely, the person doing so is engaged in theft of
intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code
protection does not mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection
features of our products. Attempts to break Microchip’s code protection feature may be a violation of the Digital
Millennium Copyright Act. If such acts allow unauthorized access to your software or other copyrighted work, you
may have a right to sue for relief under that Act.
Legal Notice
Information contained in this publication regarding device applications and the like is provided only for your
convenience and may be superseded by updates. It is your responsibility to ensure that your application meets with
AN3453
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 29

your specifications. MICROCHIP MAKES NO REPRESENTATIONS OR WARRANTIES OF ANY KIND WHETHER
EXPRESS OR IMPLIED, WRITTEN OR ORAL, STATUTORY OR OTHERWISE, RELATED TO THE INFORMATION,
INCLUDING BUT NOT LIMITED TO ITS CONDITION, QUALITY, PERFORMANCE, MERCHANTABILITY OR
FITNESS FOR PURPOSE. Microchip disclaims all liability arising from this information and its use. Use of Microchip
devices in life support and/or safety applications is entirely at the buyer’s risk, and the buyer agrees to defend,
indemnify and hold harmless Microchip from any and all damages, claims, suits, or expenses resulting from such
use. No licenses are conveyed, implicitly or otherwise, under any Microchip intellectual property rights unless
otherwise stated.
Trademarks
The Microchip name and logo, the Microchip logo, Adaptec, AnyRate, AVR, AVR logo, AVR Freaks, BesTime,
BitCloud, chipKIT, chipKIT logo, CryptoMemory, CryptoRF, dsPIC, FlashFlex, flexPWR, HELDO, IGLOO, JukeBlox,
KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, Microsemi logo, MOST,
MOST logo, MPLAB, OptoLyzer, PackeTime, PIC, picoPower, PICSTART, PIC32 logo, PolarFire, Prochip Designer,
QTouch, SAM-BA, SenGenuity, SpyNIC, SST, SST Logo, SuperFlash, Symmetricom, SyncServer, Tachyon,
TempTrackr, TimeSource, tinyAVR, UNI/O, Vectron, and XMEGA are registered trademarks of Microchip Technology
Incorporated in the U.S.A. and other countries.
APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, FlashTec, Hyper Speed Control,
HyperLight Load, IntelliMOS, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus,
ProASIC Plus logo, Quiet-Wire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider,
Vite, WinPath, and ZL are registered trademarks of Microchip Technology Incorporated in the U.S.A.
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, BlueSky, BodyCom,
CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM,
dsPICDEM.net, Dynamic Average Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial Programming, ICSP,
INICnet, Inter-Chip Connectivity, JitterBlocker, KleerNet, KleerNet logo, memBrain, Mindi, MiWi, MPASM, MPF,
MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM,
PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, SAM-ICE, Serial Quad
I/O, SMART-I.S., SQI, SuperSwitcher, SuperSwitcher II, Total Endurance, TSHARC, USBCheck, VariSense,
ViewSpan, WiperLock, Wireless DNA, and ZENA are trademarks of Microchip Technology Incorporated in the U.S.A.
and other countries.
SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.
The Adaptec logo, Frequency on Demand, Silicon Storage Technology, and Symmcom are registered trademarks of
Microchip Technology Inc. in other countries.
GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of Microchip
Technology Inc., in other countries.
All other trademarks mentioned herein are property of their respective companies.
©
2020, Microchip Technology Incorporated, Printed in the U.S.A., All Rights Reserved.
ISBN: 978-1-5224-6008-4
Quality Management System
For information regarding Microchip’s Quality Management Systems, please visit http://www.microchip.com/quality.
AN3453
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 30

AMERICAS ASIA/PACIFIC ASIA/PACIFIC EUROPE
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://www.microchip.com/support
Web Address:
http://www.microchip.com
Atlanta
Duluth, GA
Tel: 678-957-9614
Fax: 678-957-1455
Austin, TX
Tel: 512-257-3370
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Novi, MI
Tel: 248-848-4000
Houston, TX
Tel: 281-894-5983
Indianapolis
Noblesville, IN
Tel: 317-773-8323
Fax: 317-773-5453
Tel: 317-536-2380
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
Tel: 951-273-7800
Raleigh, NC
Tel: 919-844-7510
New York, NY
Tel: 631-435-6000
San Jose, CA
Tel: 408-735-9110
Tel: 408-436-4270
Canada - Toronto
Tel: 905-695-1980
Fax: 905-695-2078
Australia - Sydney
Tel: 61-2-9868-6733
China - Beijing
Tel: 86-10-8569-7000
China - Chengdu
Tel: 86-28-8665-5511
China - Chongqing
Tel: 86-23-8980-9588
China - Dongguan
Tel: 86-769-8702-9880
China - Guangzhou
Tel: 86-20-8755-8029
China - Hangzhou
Tel: 86-571-8792-8115
China - Hong Kong SAR
Tel: 852-2943-5100
China - Nanjing
Tel: 86-25-8473-2460
China - Qingdao
Tel: 86-532-8502-7355
China - Shanghai
Tel: 86-21-3326-8000
China - Shenyang
Tel: 86-24-2334-2829
China - Shenzhen
Tel: 86-755-8864-2200
China - Suzhou
Tel: 86-186-6233-1526
China - Wuhan
Tel: 86-27-5980-5300
China - Xian
Tel: 86-29-8833-7252
China - Xiamen
Tel: 86-592-2388138
China - Zhuhai
Tel: 86-756-3210040
India - Bangalore
Tel: 91-80-3090-4444
India - New Delhi
Tel: 91-11-4160-8631
India - Pune
Tel: 91-20-4121-0141
Japan - Osaka
Tel: 81-6-6152-7160
Japan - Tokyo
Tel: 81-3-6880- 3770
Korea - Daegu
Tel: 82-53-744-4301
Korea - Seoul
Tel: 82-2-554-7200
Malaysia - Kuala Lumpur
Tel: 60-3-7651-7906
Malaysia - Penang
Tel: 60-4-227-8870
Philippines - Manila
Tel: 63-2-634-9065
Singapore
Tel: 65-6334-8870
Taiwan - Hsin Chu
Tel: 886-3-577-8366
Taiwan - Kaohsiung
Tel: 886-7-213-7830
Taiwan - Taipei
Tel: 886-2-2508-8600
Thailand - Bangkok
Tel: 66-2-694-1351
Vietnam - Ho Chi Minh
Tel: 84-28-5448-2100
Austria - Wels
Tel: 43-7242-2244-39
Fax: 43-7242-2244-393
Denmark - Copenhagen
Tel: 45-4485-5910
Fax: 45-4485-2829
Finland - Espoo
Tel: 358-9-4520-820
France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Garching
Tel: 49-8931-9700
Germany - Haan
Tel: 49-2129-3766400
Germany - Heilbronn
Tel: 49-7131-72400
Germany - Karlsruhe
Tel: 49-721-625370
Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Germany - Rosenheim
Tel: 49-8031-354-560
Israel - Ra’anana
Tel: 972-9-744-7705
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Italy - Padova
Tel: 39-049-7625286
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
Norway - Trondheim
Tel: 47-72884388
Poland - Warsaw
Tel: 48-22-3325737
Romania - Bucharest
Tel: 40-21-407-87-50
Spain - Madrid
Tel: 34-91-708-08-90
Fax: 34-91-708-08-91
Sweden - Gothenberg
Tel: 46-31-704-60-40
Sweden - Stockholm
Tel: 46-8-5090-4654
UK - Wokingham
Tel: 44-118-921-5800
Fax: 44-118-921-5820
Worldwide Sales and Service
© 2020 Microchip Technology Inc.
Application Note
DS00003453A-page 31
