
U.S. Department
of Transportation
National Highway
Traffic Safety
Administration
____________________________________________________________________________
DOT HS 810 794 July 2007
NHTSA Technical Report
Statistical Analysis of the Effectiveness of
Electronic Stability Control (ESC) Systems –
Final Report
_____________________________________________________________________
This document is available to the public at the Docket Management System of the U.S. Department of Transportation.
The United States Government does not endorse products or manufacturers. Trade or
manufacturers’ names appear only because they are considered essential to the object of
this report.

Technical Report Documentation Page
1. Report No.
DOT HS 810 794
2. Government Accession No. 3. Recipient’s Catalog No.
5. Report Date
July 2007
4. Title and Subtitle
STATISTICAL ANALYSIS OF THE EFFECTIVENESS OF
ELECTRONIC STABILITY CONTROL (ESC) SYSTEMS –
FINAL REPORT
6. Performing Organization Code
7. Author(s)
Jennifer N. Dang
8. Performing Organization Report No.
10. Work Unit No. (TRAIS)
9. Performing Organization Name and Address
Evaluation Division; National Center for Statistics and Analysis
National Highway Traffic Safety Administration
Washington, DC 20590
11. Contract or Grant No.
13. Type of Report and Period Covered
NHTSA Technical Report
12. Sponsoring Agency Name and Address
Department of Transportation
National Highway Traffic Safety Administration
Washington, DC 20590
14. Sponsoring Agency Code
15. Supplementary Notes
16. Abstract
Electronic Stability Control (ESC) is a safety technology designed to enhance a vehicle’s stability and control in all driving situations. ESC first became available in the United
States in 1997. Statistical analyses of 1997-2004 crash data from the Fatality Analysis Reporting System (FARS) and 1997-2003 crash data from the State data files estimate
reductions with ESC for various types of crash involvements.
• ESC reduced fatal run-off-road crashes by 36 percent for passenger cars and 70 percent for light trucks and vans (LTVs). The reductions are statistically significant.
• Police-reported run-off-road involvements were decreased by 45 percent in passenger cars and 72 percent in LTVs. The decreases are statistically significant.
• Fatal single-vehicle crashes that did not involve pedestrians, bicycles, and animals decreased (due to ESC) by 36 percent in passenger cars and 63 percent in LTVs. The
decreases are statistically significant.
• ESC reduced police-reported single-vehicle crashes (excluding pedestrian, bicycle, animal crashes) by 26 percent for passenger cars and 48 percent for LTVs. The
reductions are statistically significant.
• Rollover involvements in fatal crashes were decreased by 70 percent in passenger cars and 88 percent in LTVs. The decreases are statistically significant.
• Police-reported crashes involving rollovers were reduced by 64 percent in passenger cars and 85 percent in LTVs. The reductions are statistically significant.
• ESC reduced culpable fatal multi-vehicle crashes by 19 percent for passenger cars and 34 percent for LTVs. Only the reduction involving LTVs is statistically
significant.
• Culpable involvements in police-reported multi-vehicle crashes were decreased by 13 percent in passenger cars and 16 percent in LTVs. The decreases are
statistically significant.
• Overall, ESC reduced all fatal crashes by 14 percent for passenger cars and 28 percent for LTVs. Only the reduction in LTVs is statistically significant.
• Overall, police-reported crash involvements decreased by 8 percent in passenger cars and 10 percent in LTVs. The decreases are statistically significant.
17. Key Words
NHTSA; FARS; ESC; statistical analysis;
evaluation; benefits; effectiveness; fatality
reduction; electronic stability control systems;
18. Distribution Statement
Document is available to the public at the Docket
Management System of the U.S. Department of
Transportation, http://dms.dot.gov
, Docket Number
28629.
19. Security Classif. (Of this report)
Unclassified
20. Security Classif. (Of this page)
Unclassified
21. No. of Pages
63
22. Price
Form DOT F 1700.7 (8-72) Reproduction of completed page authorized
iii
TABLE OF CONTENTS
LIST OF ABBREVIATIONS ……………………………………………………….iv
ACKNOWLEDGEMENTS ………………………………………………………….v
EXECUTIVE SUMMARY ……………………………………………………..….. vi
BACKGROUND …………………………………………………………………......1
ESC INFORMATION …………………………………………………………..……5
CRASH DATA (STATE AND FARS) …………………………………………….. 11
ANALYSIS DATABASES ………………………………………………………… 12
VIN decode …………………………………………………………………………..12
Crash involvements ……………………………………………………..................... 13
2X2 CONTINGENCY TABLE ANALYSIS ………………………………………...18
Analysis of fatal crashes (FARS) ………………………………………..................... 20
Analysis of crash involvements (State Data) …………………………………………25
LOGISTIC REGRESSION ANALYSIS ………………………………………….…. 46
COMPARISON OF 2-CHANNEL AND 4-CHANNEL ESC SYSTEMS……………48
CONCLUSIONS………………………………………………………………….….. 52
iv
LIST OF ABBREVIATIONS
ABS Antilock brake systems
ASE Asymptotic standard error
CATMOD Categorical models procedure in SAS
ESC Electronic Stability Control
FARS Fatality Analysis Reporting System
FMVSS Federal Motor Vehicle Safety Standard
GENMOD Generalized estimating models procedure in SAS
GM General Motors
IIHS Insurance Institute for Highway Safety
LR Likelihood-ratio
LTVs Light trucks and vans
MEANS MEANS (simple statistics) procedure in SAS
NCSA National Center for Statistics and Analysis
NHTSA National Highway Traffic Safety Administration
OMB Office of Management and Budget
SAS Statistical analysis software produced by SAS Institute, Inc.
SE Standard error
SUV Sport utility vehicle
TCS Traction control systems
VIN Vehicle Identification Number

v
ACKNOWLEDGEMENTS
I owe special thanks to the two researchers who peer-reviewed a draft of the report:
1) Dr. Charles M. Farmer, Director of Statistical Services, Insurance Institute for
Highway Safety, Arlington, Virginia
2) Professor Claes Tingvall, Dr Med Sc, Director of Traffic Safety at Swedish Road
Administration
This study estimates the effectiveness of Electronic Stability Control (ESC) in reducing
crashes, specifically crashes where ESC is likely to have made a difference in the
vehicle’s involvement, based on statistical analyses of crash data. The National Highway
Traffic Safety Administration (NHTSA) published a draft of this report in support of a
proposed rulemaking to establish a new Federal Motor Vehicle Safety Standard, FMVSS
No. 126, which requires ESC systems on passenger cars, multipurpose vehicles, trucks,
and buses with a gross vehicle weight rating of 10,000 pounds or less (See NHTSA
Docket Number 25801-02 at http://dms.dot.gov). Because of the potential impacts of the
proposed regulation, the report contains “highly influential scientific information” as
defined by the Office of Management and Budget’s (OMB) “Final Information Quality
Bulletin for Peer Review” (available at
www.whitehouse.gov/omb/inforeg/peer2004/peerbulletin.pdf). Therefore, the report had
to be peer-reviewed in accordance with the requirements of both Sections II and III of
OMB’s Bulletin.
The peer-review process differed from the type used by journals. The effort by Dr.
Farmer and Professor Tingvall was essentially assessment of the scientific adequacy of
the draft to identify weaknesses and help NHTSA strengthen the report. These two
reviewers were selected by NHTSA staff. The publication of this report does not
necessarily imply that the reviewers supported it or concurred with the findings. You may
access their comments on the draft along with the revised report and the entire review
process in the NHTSA docket (Number 26415) at http://dms.dot.gov
. We have tried to
address all of the comments in our revised report (but we did not send it back to the
reviewers for a second round of review). The text and footnotes of the report single out
some of the reviewers’ comments that instigated additions or revisions to the analyses.
vi
EXECUTIVE SUMMARY
Electronic Stability Control (ESC) is a safety system designed to recognize adverse
driving conditions by 1) continuously measuring and evaluating the speed, the steering
wheel angle, the yaw rate, and the lateral acceleration of a vehicle from various sensors
and 2) using those measured data to compare a driver’s steering input with the vehicle’s
actual motion. If an unstable situation is detected, then ESC automatically intervenes to
assist the driver and stabilize the vehicle by applying the brakes to individual wheels as
needed and possibly reducing engine torque. This technology is expected to reduce the
number of crashes due to driver error and loss of control, because it has the potential to
anticipate situations leading up to some crashes before they occur and the capability to
automatically intervene to prevent them. A major benefit should be the reduction of
single-vehicle crashes that involve losing control and running off the road.
In September, 2004, the National Highway Traffic Safety Administration (NHTSA)
issued an evaluation note on the Preliminary Results Analyzing the Effectiveness of
Electronic Stability Control (ESC) Systems. The data suggested that ESC was highly
effective in reducing single-vehicle run-off-road crashes. The study was based on
Fatality Analysis Reporting System (FARS) data from calendar years 1997-2003 and
crash data from five States from calendar years 1997-2002. The data were limited to
mostly luxury vehicles because ESC first became available in 1997 in luxury vehicles
such as Mercedes-Benz and BMW.
NHTSA has now updated and modified its 2004 report, extending it to model year 1997-
2004 vehicles – and to calendar year 2004 for the FARS analysis and calendar year 2003
for the State data analysis. Nevertheless, even as of 2004, a large proportion of the
vehicles equipped with ESC were still luxury vehicles. Moreover, only passenger cars
and SUVs had been equipped with ESC – no pickup trucks or minivans.
The FARS database included fatal crash involvements from calendar years 1997 to 2004.
The State databases included crash cases from California (2001-2003), Florida (1997-
2003), Illinois (1997-2002), Kentucky (1997-2002), Missouri (1997-2003), Pennsylvania
(1997-2001, 2003), and Wisconsin (1997-2003).
The basic analytical approach was to estimate the reduction of crash involvements of the
types that are most likely to have benefited from ESC – relative to a control group of
other types of crashes where ESC is unlikely to have made a difference in the vehicle’s
involvement. Crash involvements in which a vehicle 1) was stopped, parked, backing up,
or entering/leaving a parking space prior to the crash, 2) traveled at a speed less than 10
mph, 3) was struck in the rear by another vehicle, or 4) was a non-culpable party in a
multi-vehicle crash on a dry road, were considered the control group (non-relevant
involvements) – because ESC would in almost all cases not have prevented the crash.
The types of crash involvements where ESC would likely or at least possibly have an
effect are:

vii
• Single-vehicle crashes in which a vehicle ran off the road and then hit a fixed
object and/or rolled over.
• Involvements as a culpable party in a multi-vehicle crash on a dry or wet road.
• Collisions with pedestrians, bicycles, or animals.
The principal findings and conclusions of the statistical analyses are the following:
RUN-OFF-ROAD CRASHES
• ESC reduced involvements in all types of single-vehicle run-off-road crashes the
following percentages:
Crash reduction by ESC (%)
Cars
LTVs
Fatal crash involvements 36 70
Police-reported crash involvements 45 72
• All four of these reductions are statistically significant.
SINGLE-VEHICLE CRASH REDUCTION
• ESC reduced all single-vehicle involvements (excluding pedestrian, bicycle,
animal crashes) by the following percentages:
Crash reduction by ESC (%)
Cars
LTVs
Fatal single-vehicle crash involvements 36 63
Police-reported single-vehicle crash involvements 26 48
• All four reductions are statistically significant.
ROLLOVER CRASHES
• ESC was especially effective in preventing single-vehicle first-event rollovers.
Crash reduction by ESC (%)
Cars LTVs
Fatal rollovers 70 88
Police-reported rollovers 64 85
• All four of these reductions are statistically significant.
CULPABLE INVOLVEMENTS IN MULTI-VEHICLE CRASHES
• ESC likely reduces involvements as a culpable party in multi-vehicle crashes.
Crash reduction by ESC (%)
Cars LTVs
Fatal culpable multi-vehicle crash involvements 19 34
Police-reported culpable multi-vehicle crash involvements 13 16
viii
• Only the reduction in fatal crash involvements in passenger cars is not statistically
significant.
COLLISIONS WITH PEDESTRIANS – BICYCLES – ANIMALS
• There are no consistently significant results in either direction for crashes that
involve pedestrians, bicycles, or animals
Crash reduction by ESC (%)
Cars LTVs
Fatal pedestrian, bicycle, animal crashes -36 -6
Police-reported pedestrian, bicycle, animal crashes 26 -11
• Only the reduction in police-reported crash involvements in passenger cars is
statistically significant. We will continue to monitor the effect of ESC on this
particular type of crash involvements in the future – because we do not have
enough data (at the moment) for any conclusions.
OVERALL CRASH REDUCTION
• ESC reduced all crash involvements by the following percentages:
Crash reduction by ESC (%)
Cars LTVs
All fatal crash involvements 14 28
All police-reported crash involvements 8 10
• Only the reduction in fatal crash involvements in passenger cars is not statistically
significant.
4-CHANNEL VERSUS 2-CHANNEL ESC SYSTEMS IN PASSENGER CARS
The passenger car sample includes certain make-models that had 2-channel ESC systems
and others that had 4-channel systems. Separate analyses were performed to analyze the
difference in effectiveness (if any) between 2-channel and 4-channel systems. We found:
Greater
fatal run-off-road reduction with 2-channel systems – but the larger observed
fatality reduction with 2-channel systems is not statistically significantly different from
the observed reduction with 4-channel systems. The reductions were most certainly
influenced by the small samples.
Larger
reduction with 4-channel systems when police-reported crash involvements were
included (as expected with larger samples). The larger reduction with 4-channel systems
in all run-off-road involvements (mostly non-fatal crashes) is statistically significant.

1
BACKGROUND
Automotive braking technologies have evolved from very simple systems (i.e., block
brakes) to more sophisticated systems (i.e., cable-operated four-wheel brakes, hydraulic
four-wheel brakes, drum brakes, disc brakes with front-rear split, etc.). Today, drivers
rely on much more technologically-advanced systems to help them not only to decelerate
and accelerate but also to stabilize their vehicles while in motion, such as:
Antilock Brake Systems (ABS) are the first of a series of three braking technology
developments. They are four-wheel systems that prevent wheel lock-up by automatically
modulating the brake pressure when the driver makes an emergency stop.
Traction Control Systems (TCS) are the second technology. They deal specifically with
front-to-back loss of friction between the vehicle’s tires and the road surface during
acceleration.
Electronic Stability Control (ESC) systems are another important technology evolving
from and incorporating the first two technologies – ABS and TCS – with additional
capabilities. They are stability enhancement systems designed to improve vehicles’
lateral stability by electronically detecting and automatically assisting drivers in
dangerous situations (e.g., understeer and oversteer) and under unfavorable conditions
(e.g., rain, snow, sleet, ice). ESC systems have sensors that monitor the speed, the
steering wheel angle, the yaw rate, and the lateral acceleration of the vehicle. Data from
the sensors are used to compare a driver’s intended course with the vehicle’s actual
movement to detect when a driver is about to lose control of a vehicle and automatically
intervene in split seconds by applying the brakes to individual wheels and possibly
reducing engine torque to provide stability and help the driver stay on course. For
example, if an ESC system detects that the rear wheels have begun to slide to the right
and the vehicle is yawing counter-clockwise, it may momentarily brake the right front
wheel, imparting a clockwise torque to counteract the excessive counterclockwise yaw
and stabilize the vehicle. Depending on the driving situation, these brake interventions
may also be used to slow down the vehicle to a speed more appropriate for the operating
conditions.
The reasons ESC appears to provide safety benefits are twofold: (1) it can anticipate
situations leading up to some loss-of-control crashes before they occur, and (2) it has the
capability to mitigate these crashes via automatic intervention. Hence, the potential
benefit should be primarily a reduction of single-vehicle crashes that involve losing
control and running off the road. These crashes include rollovers and collisions with
fixed objects.
In a first published study
1
analyzing the effectiveness of ESC on three Toyota passenger
car make-models, Aga and Okada reported in 2003, a 36 percent reduction in single-
vehicle crash rates (single-vehicle crashes per 10,000 vehicles per year) when they
compared make-model vehicles with ESC and those without ESC. The study also
1
Aga, M. and Okada, A. (2003) Analysis of Vehicle Stability Control (VSC)’s Effectiveness from
Accident Data, Paper Number 541, Proceedings of the 18
th
International Technical Conference on the
Enhanced Safety of Vehicles.

2
showed a reduction (28 percent) in the rates of head-on collisions in studied vehicles that
are equipped with ESC relative to those that are not equipped with ESC.
In 2004, the National Highway Traffic Safety Administration (NHTSA) initiated an
evaluation to assess the effectiveness of ESC in reducing single-vehicle crashes in
various domestic and imported passenger cars and Sport Utility Vehicles (SUVs). The
preliminary results from that study
2
showed that ESC is highly effective in reducing
single-vehicle crashes. In fact, single-vehicle crashes were reduced by 35 percent in
passenger cars, and 67 percent in SUVs. Similarly, fatal single-vehicle crashes were
reduced by 30 percent in passenger cars, and 63 percent in SUVs.
In a study published in 2004 by the Insurance Institute for Highway Safety (IIHS)
3
,
Farmer compared per vehicle crash involvement rates of vehicles with model years that
had ESC as standard equipment with identical make-model year vehicles that did not.
Farmer found that ESC reduced single-vehicle crash involvement risk by approximately
41 percent and reduced single-vehicle injury risk by the same amount. Overall, crash
involvement risk was reduced by 7 percent for all crashes and 9 percent for injury
crashes. For fatal crash involvements, it was estimated that ESC reduced single-vehicle
crash involvement risk by 56 percent and overall fatal crash involvement risk by 34
percent. The effect of ESC on multi-vehicle crashes was found to be minimal and not
statistically significant. Unlike the NHTSA evaluation, this study combined the results
for passenger cars and SUVs.
In another study published in 2004
4
, researchers in Sweden (Tingvall et al.) reported a 32
percent crash reduction with ESC on wet roads and a 38 percent reduction on roads
covered with ice and snow. For all crashes except rear-end impacts, the study found an
overall 22 percent reduction in crashes involving vehicles with ESC versus those without
ESC. In this study, rear-end crashes on dry surfaces, assumed to be unaffected by the
presence of ESC, were used as the control group. The data set used in the analysis
consists of Swedish police reported crashes where at least one occupant was injured. In
2006, Tingvall et al. conducted a follow-up study analyzing the effectiveness of ESC
specifically by injury severity.
5
For serious and fatal loss-of-control type crashes, it was
estimated that ESC reduced those types of crashes by 56 percent on wet roads and 49
percent on roads that were covered with ice and snow.
2
Dang, J. (2004) Preliminary Results Analyzing the Effectiveness of Electronic Stability Control (ESC)
Systems, NHTSA Evaluation Note No. DOT HS 809 790, Washington, D.C.
3
Farmer, C. (2004) Effect of Electronic Stability Control on Automobile Crash Risk, Traffic Injury
Prevention, Vol 5, pp. 317-325.
4
Lie, A., Tingvall, C., Krafft, M., and Kullgren, A. (2004) The Effectiveness of ESP (Electronic Stability
Program) in Reducing Real Life Accidents, Traffic Injury Prevention, Vol 5, pp. 37-41.
5
Lie, A., Tingvall, C., Krafft, M., and Kullgren, A. (2006) The Effectiveness of ESC (Electronic Stability
Control) in Reducing Real Life Crashes and Injuries, Traffic Injury Prevention, Vol 7, pp. 38-43.

3
The latest study from the University of Michigan Transportation Research Institute
6
confirmed the results of earlier studies worldwide – ESC is highly effective in preventing
single-vehicle crashes, especially rollovers in SUVs. Similar to the NHTSA evaluation,
this study analyzed the effectiveness of ESC separately for passenger cars and SUVs.
The study found that for single-vehicle crashes, ESC reduced the risk of a fatal crash
involvement by 31 percent for passenger cars and 50 percent for SUVs. These analyses
were repeated, for both passenger cars and SUVs, after restricting the data to vehicles that
were three years old or newer at the time of the crash – to control for the effect (if any) of
the age of the vehicle. The results showed that the vehicle age factor did not compromise
the significant reductions in the risk of single-vehicle crash involvements associated with
ESC-equipped vehicles. The risks of fatal rollover involvements were also decreased for
passenger cars and SUVs – 40 percent and 73 percent, respectively. For the analysis of
fatal crash involvements, multi-vehicle crash involvements were used as the control
group. The study also analyzed a nationally representative probability sample of crashes
that included mostly non-fatal crashes. It found significant reductions in run-off-road
crashes for passenger cars and SUVs – 55 percent and 70 percent, respectively. For the
analysis of these mostly non-fatal crashes, struck vehicles involved in rear-end crashes
were used as the control group.
The 2004 NHTSA study used crash data from five States from calendar years 1997 to
2002 and Fatality Analysis Reporting System (FARS) data from calendar years 1997 to
2003, because the study was limited to the years when ESC was offered as standard
equipment on certain vehicle models. Mercedes-Benz and BMW were the first two
manufacturers that installed ESC as standard equipment in certain models in 1997 and in
all models by 2000 and 2001, respectively. Their vehicles constituted 61 percent of the
passenger car sample used in the 2004 study. The passenger car sample also includes
some luxury GM cars, which constituted 23 percent of the sample, and a few luxury cars
from other manufacturers. As for the sample used in the analysis for SUVs, Toyota and
Lexus models constituted 78 percent of that sample. In other words, the data samples
used in the 2004 study are limited to mostly imported luxury vehicles, and thus, they are
not well represented across the entire fleet.
Sales of vehicles equipped with ESC are gradually increasing as shown in Table 1. In
2003, merely 10 percent of that year’s vehicle sales are from vehicles that had ESC. By
2006, nearly one-third
of the new vehicles are expected to have ESC. Thus, future
analysis data samples should consist of a more representative cross-section of the fleet
that will include not only non-luxury vehicles but also a wider variety of manufacturers.
The availability of such data is likely to take at least a few more years. Until then,
NHTSA will continue to evaluate the effectiveness of ESC with limited analysis samples
of crash data from selected make-models of vehicles that had ESC and earlier versions of
similar make-models that did not. The make-models used in this study consist of not only
those used in the 2004 study but also other make-models and the model years extended to
one more year.
6
Green, P. and Woodrooffe, J. (2006) The Effectiveness of Electronic Stability Control on Motor Vehicle
Crash Prevention, Report Number UMTRI-2006-12, University of Michigan Transportation Research
Institute, Ann Arbor, MI.

4
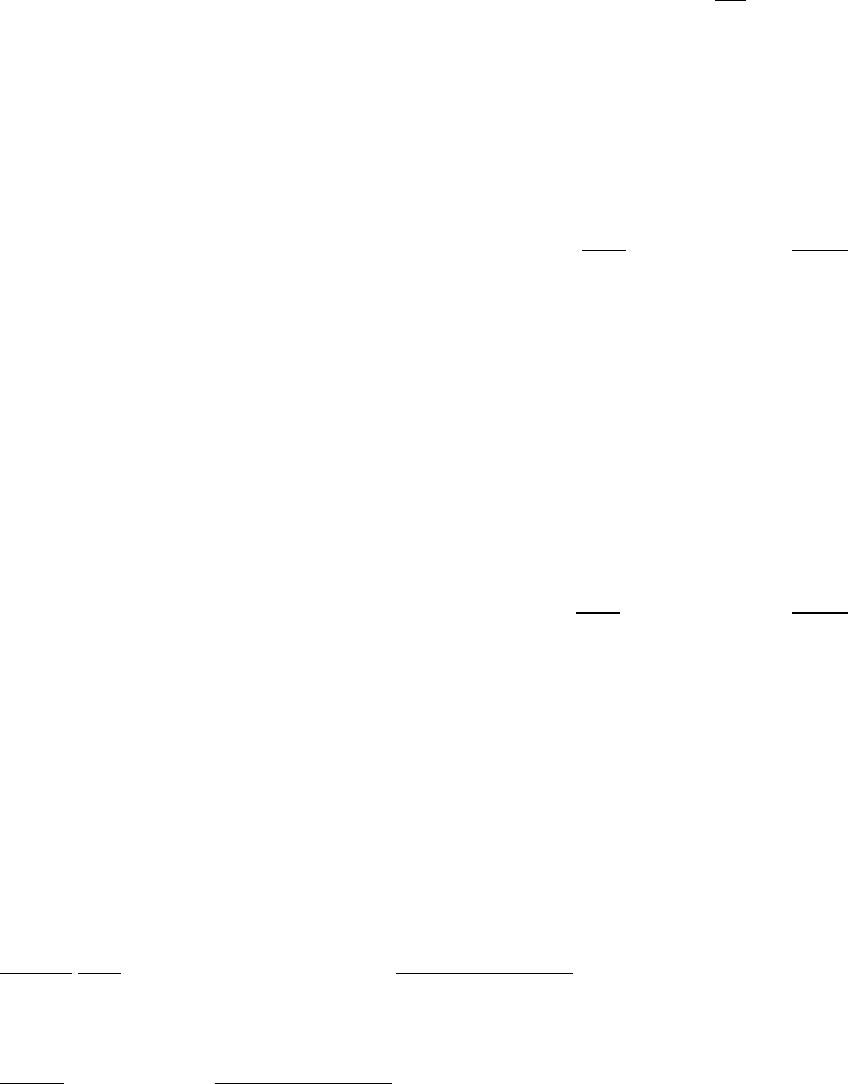
Table 1: Percent of the Vehicle Sales that are from Vehicles Equipped with ESC
By Vehicle Group and Model Year
Vehicle Group
Model Year
2003
Model Year
2004
Model Year
2005
(expected)
Model
Year 2006
(expected)
Domestic cars*
3.5% 7.7% 8.2% 10.0%
Domestic trucks*
4.9% 10.2% 15.2% 26.6%
Imported cars
36.6% 45.5% 40.5% 54.3%
Imported trucks
31.8% 48.4% 63.4% 73.5%
All new vehicles 9.7% 15.9% 19.2% 28.6%
* Includes transplants
With one more year of crash data recently available, NHTSA has embarked on this
update and modification of its 2004 analysis, extending it to calendar year 2004 for the
FARS analysis and calendar year 2003 for the State data analysis. The primary objective
of this study is to assess the effectiveness of ESC in reducing crashes, specifically crashes
where ESC is likely to have made a difference in the vehicle’s involvement, while
controlling for others in which ESC is unlikely to have been a factor. The study consists
of a series of analyses of crash data of various domestic and imported passenger cars and
LTVs (light trucks and vans, including pickup trucks, SUVs, minivans, and full-size vans
with Gross Vehicle Weight Rating up to 10,000 pounds) from model years 1997 to 2004.
As its principal analytic tool, the agency utilized 2x2 contingency tables of crash data
from specific make-models equipped with ESC versus earlier versions of similar make-
models not equipped with ESC, using non-relevant crash involvements as a control
group. As a check, a logistic regression analysis of the effectiveness of ESC in reducing
relevant crash involvements (specifically single-vehicle crashes which involve a vehicle
running off the road, while controlling for other non-relevant crash involvements) was
also performed using FARS data in order to adjust for the imbalances in various make-
models of vehicles with ESC versus those of similar make-models without ESC and to
account for the confounding effects from other external factors. We also looked
separately at crash reduction with 2-channel and 4-channel ESC systems. The reason for
doing this is that GM make-models used in the analyses (except for the Corvette) all had
2-channel ESC systems, whereas non-GM make-models all had 4-channel systems.
The next several sections discuss in detail: (1) the availability of ESC (particularly,
which make-model passenger cars and LTVs had ESC and which did not); (2) the
analysis databases (specifically, what and how various data files were obtained and used
in the analysis); and (3) the methods of analyzing crash data and estimating the
effectiveness of ESC in reducing crashes – followed by the results from a series of
statistical analyses of crash data. A summary discussion of the findings concludes the
report.

5
ESC INFORMATION
Due to the fact that (1) ESC was first introduced in the U.S. on certain luxury vehicles in
1997 and (2) it was not until recently that ESC was offered on non-luxury vehicles,
information is not readily obtainable for earlier model years. For example, ESC was not
listed in Buying a Safer Car
7
until 2001, and Ward’s Automotive Yearbook
8
did not
begin reporting ESC information in its yearbook until 2004. The yearly-published
Buying a Safer Car booklet lists safety feature information for the current year’s
production of vehicles, whereas Ward’s yearbook contains a list of factory-installed
equipment for the previous year’s production of vehicles. For instance, Ward’s
Automotive Yearbook 2001 contains a list of factory-installed equipment for vehicles
produced in calendar year 2000, whereas Buying a Safer Car 2001 lists safety
information for vehicles produced in calendar year 2001. Hence, information such as the
availability of ESC in vehicles with model years prior to 2000 had to be obtained
elsewhere (e.g., www.edmunds.com, www.cars.com). Furthermore, since ESC is a fairly
new technology for the U.S. market, information on its availability can vary from one
source to another. In such cases, information had to be verified with the manufacturers
for accuracy.
For the purpose of analysis, make-models of passenger cars and LTVs that are equipped
with ESC as standard equipment were compared with earlier versions of similar make-
models. Thus, only vehicles in which 1) the percentage of factory-installed equipment
for “stability control” systems increased from 0 to 100 percent (Wards’ Automotive
Yearbook) or 2) ESC is listed as standard in all vehicles in that model line for particular
model years and not available at all for previous model years (Buying a Safer Car
Booklet, etc.) were included in the analysis. Vehicles with ESC as optional equipment
were excluded from the analysis because we could not determine (from the VIN) which
vehicles had ESC and which did not.
9
Tables 2 through 4 show ESC availability on selected make-model passenger cars. In
some cases, models that had factory-installed ESC as a standard feature were compared
with earlier versions of identical
models because those models remained the same (e.g.
same chassis generation) during the pre- and post-ESC years – as shown in Table 2. In
other words, for each vehicle listed in Table 2, exactly the same model – before and after
ESC was introduced – was used for comparison. The conversion from not having ESC at
all to having ESC as standard equipment should occur in consecutive model years as
shown in most models except for the Chevrolet Corvette. ESC was introduced as
optional equipment on the Chevrolet Corvette for model years 1998-2000. Those model
years were eliminated from the study.
7
This book is published yearly by NHTSA.
8
This book is published yearly by Ward’s Communication, Inc.
9
We did examine those make-models that had ESC as optional equipment, under the assumption that all
these vehicles did not have ESC, and these additional data did not make a big difference in the overall
effectiveness.

6
Table 2: "Identical" Make-Model Comparison of Vehicles (except Mercedes-Benz) In
Model Years - With ESC and Without ESC - for Passenger Cars
Make Model
Model Years
with
No ESC
Model Years
with
ESC (Standard)
Acura 3.5RL 1997-1999 2000-2004
Audi A6 (2.7L) Sedan 2000 2001-2004
Audi TT (1.8L) 180hp Coupe 2000 2001-2004
BMW 740I 1997 1998-2001
BMW 740IL Sedan 1997 1998-2001
Buick Park Avenue Ultra 1997-1999 2000-2004
Cadillac DeVille Concours 1997 1998-1999
Chevrolet Corvette 1997 2001-2004
Lexus GS400 1998 1999-2000
Lexus LS400 1997-1998 1999-2000
Saab 9-5 Aero Sedan/Sport Wagon 2000-2001 2002-2004
In other cases, similar make-models (except for the Mercedes-Benz vehicles which will
be discussed separately) were used for the comparison since the original models were
redesigned, not available, or not of the same chassis generation during the transitional
years (Table 3). For instance, the 2000 Audi A4 (1.8L), 2000 A4 (1.8L) Quattro, and
2000 A4 (1.8L) Avant Quattro models were not of the same chassis generation as their
2002-2004 models. ESC was offered as optional feature on the model year 2001 for
those vehicles, and thus, that model year was not included in the study. The 2004 Audi
A8 4.2L Quattro was not available; thus, the 2004 A8 L was included in the analysis
instead. The 1997 and 1998-2004 Cadillac Seville SLS and STS models were also on a
different chassis, and so did the 1997 and 1998-2004 Lexus GS300, 1997-1999 and 2001-
2003 Oldsmobile Aurora (4.0L), and 1999 and 2002-2004 Volkswagen GTI VR6 models.
As previously mentioned and currently illustrated in Table 3, BMW installed ESC in
certain 5, 7, and 8 series models as early as 1997 and had made it standard in all their
models by 2001, but the installation did not necessarily occur in the same year for all the
sub-series of a make-model. For example, the 3 series coupe and sedan models had ESC
in 2000 whereas the 3 series convertible had it in 2001. Therefore, comparison of
vehicles with ESC and those without ESC was done at the sub-series level. Furthermore,
some manufacturers often changed their sub-series models; thus, it is very difficult to
make an exact model-to-model comparison since the analysis databases consist of crash
data of various make-models ranging from model years 1997-2003 for the State data
analysis and 1997-2004 for the FARS data analysis. In such cases, the best approach
would be to compare similar sub-series models as shown in Table 3. Since BMW’s 3 and
5 series models were completely redesigned and/or grouped into different sub-series at
some point during model years 1997-2004, different versions of the 3 and 5 series were
used depending on which model years had ESC and which did not. Similar to BMW,
General Motors changed their Pontiac Bonneville SSE model to SSEi in 2000 and
installed ESC in the new model as well. The reason that model year 2000 was not
included in the analysis for the BMW 3 series convertible is because that model was not

7
available in 2000. Model year 1999 was excluded for the BMW 525i and 530i sedan for
the same reason. The BMW 528i sedan was available in 1999; however, it did not
include ESC as standard feature – only as an option. Hence, the 1999 BMW 528i, 525i,
and 530i sedans were not included in the study. For the Volkswagen Passat, the 2000
GLS and GLX models were compared with the 2004 GLX model because the 2003
model year for both make-models had ESC as an option. The 2004 GLS model had
optional ESC as well. Likewise, the 2002 Volkswagen New Beetle (1.8L) was compared
with the 2002-2004 Turbo S models because the model years 2003-2004 of the former
had optional ESC.
Table 3: "Similar" Make-Model Comparison of Vehicles (except Mercedes-Benz) In
Model Years - With ESC and Without ESC - for Passenger Cars
Make Model
Model Years
with
No ESC
Make Model
Model
Years with
ESC
(Standard)
Audi A4 (1.8L) Sedan 2000 Audi A4 (1.8L) Sedan 2002-2004
Audi A4 (1.8L) Quattro
Sedan
2000
Audi A4 (1.8L) Quattro Sedan 2002-2004
Audi A4 (1.8L) Avant
Quattro Wagon
2000
Audi A4 (1.8L) Avant Quattro
Wagon
2002-2004
Audi A8 (4.2L) Quattro
Sedan
1998-1999 Audi A8 (4.2L) Quattro Sedan
Audi A8 L Sedan
2001-2003
2004
BMW
318/323/325/328is/M3
Coupe (6cyl)
1997-1999 BMW
323CI/325Ci/328Ci/330/M3CI
Coupe (6cyl)
2000-2004
BMW 323iC/328iC/M3
Convertible
1997-1999 BMW 325Ci/330Ci/M3Ci
Convertible
2001-2004
BMW 318/323i/328iSedan;
BMW 318TI 2Dr.
1997-1999 BMW 323/325i/328i/330i/Xi
Sedan
2000-2004
BMW 528i Sedan 1997-1998 BMW 528i/525i/530i Sedan 2000-2004
BMW 540i (AT/MT) Sedan 1997 BMW 540i (AT) Sedan 1998
BMW 540i (MT) Sedan 1998 BMW 540i/545i (AT/MT) Sedan 1999-2004
BMW Z3 (2.8L) 1997-1999 BMW Z3 (2.3L,2.5L,2.8L,3.0L) 2000-2002
Cadillac Seville SLS 1997-1998 Cadillac Seville SLS 1999-2004
Cadillac Seville STS 1997-1998 Cadillac Seville STS 1999-2004
Lexus GS300 1997-1998 Lexus GS300 1999-2004
Oldsmobile Aurora (4.0L) 1997-1999 Oldsmobile Aurora (4.0L) 2001-2003
Pontiac Bonneville SSE 1997-1999 Pontiac Bonneville SSEi 2000-2004
Volkswagen GTI VR6 1999 Volkswagen GTI VR6 2002-2004
Volkswagen Passat
GLS/GLX Sedan/Wagon
2002 Volkswagen Passat GLX
Sedan/Wagon
2004
Volkswagen New Beetle
(1.8L)
2002 Volkswagen New Beetle Turbo S
(1.8L)
2002-2004

8
Like BMW, Mercedes-Benz began installing ESC in certain sub-series of the S class
model in 1997 and had made it a standard feature in all their make-models (except one)
by 2000. For this reason, not all the sub-series (even within the same make-model – i.e.
“class”) had ESC in the same model year. Furthermore, most sub-series were changed
during calendar years 1997-2004 – either redesigned or replaced. Table 4 lists all the
available Mercedes-Benz models and sub-series from 1997 to 2004, but only with the
model years that had ESC as standard equipment and those that did not. In Table 4,
various sub-series within the Mercedes-Benz C, E, and S class that are equipped with
ESC were compared with earlier versions of similar
sub-series, for reasons already
discussed in the previous section. Unlike other manufacturers, quite a few Mercedes-
Benz sub-series had ESC as optional equipment for one, two, or even three years; hence,
those model years were not included in the analysis. For example, the C280, E300DT
sedans and the CL500C coupe all had ESC as an optional feature from 1998 to 1999.
Table 4
: Mercedes-Benz Make-Model Comparison of Model Years With ESC and
Without ESC - for Passenger Cars
Make Model No ESC Make Model
ESC
(Standard)
C36AMG
C220, C230 Sedan
C280 Sedan
1997
1997-1999
1997
C43 Sedan
C230ML Sedan
C280 Sedan
C Sedan
CL Coupe
CL600 Coupe
CLK55AMG Coupe/Cabriolet
CLK320 Coupe/Cabriolet
CLK320/CLK500
Coupe/Cabriolet
CLK430 Coupe/Cabriolet
1998-2000
2000
2000
2001-2004
2000-2004
1998-1999
2001-2002
2000-2003
2003-2004
1998-2003
E300D Sedan
E320 Sedan
1997
1997
E320 Sedan/Wagon
E320W/E500 Sedan
E430/E55 AMG Sedan
2000-2003
2003-2004
1999-2002
S320 SWB Sedan
S320 LWB Sedan
SL320 Roadster
SLK230 Kompressor
1997-1999
1997
1997
1998-2000
S430/S500/S600 Sedan
S600 Sedan
S600 Coupe
SL500 Roadster
SL500/SL55 Roadster
SL600 Roadster
SLK230/SLK320/SLK32AMG
2000-2004
1997-1999
1997
1999-2002
2003-2004
1997-2002
2001-2004
Tables 5 through 7 show the availability of ESC by make-model for selected LTVs. As
shown in these tables, the make-models used in the analysis consist of SUVs and
passenger vans – because most manufacturers had not yet installed ESC in their pickup

9
and minivan models as of 2004 – the most recent and available fatal crash data used in
this study. With the exception of the Infiniti, Land Rover, Toyota 4 Runner, Mercedes-
Benz, and one Lexus model, none of the models used in the analysis went through a
redesign in the year that ESC became standard equipment or even in the year
immediately before or after it (Table 5). Thus, we were able to compare several model
years of identical make-models for the vehicles with ESC versus those without ESC.
Furthermore, these vehicles went from not having ESC at all in one year to having ESC
as standard equipment in the following year.
Table 5: "Identical" Make-Model Comparison of LTVs In Model Years
With ESC and Without ESC
Make Model
Model Years
with
No ESC
Model Years
with
ESC (Standard)
Acura MDX 2001-2002 2003-2004
Cadillac Escalade 2WD 2002 2003-2004
Chevy Express 3500 Extended Wheelbase 2003 2004
GMC Yukon Denali AWD 2001-2002 2003-2004
GMC Yukon Denali XL AWD 2001-2002 2003-2004
GMC Savana G3500 Extended Wheelbase RWD 2003 2004
Lexus LX470 1999 2000-2004
Mitsubishi Montero Limited 2001-2002 2003-2004
Toyota Land Cruiser 1999-2000 2001-2004
Toyota RAV4 4x2 2003 2004
Toyota RAV4 4x4 2003 2004
As for the Infiniti vehicles listed in Table 6, since there are no previous versions of the
FX35 AWD, FX45AWD, and QX56 models – which had ESC starting in 2003 – the
model years 2002-2003 of the QX4 model were used as comparison vehicles that did not
have ESC. The 2001-2002 and 2003-2004 Land Rover Range Rover models were not of
the same chassis generation. The Toyota 4Runner had a design change in 2003 for both
the 4x2 and 4x4 models. The static stability factor was higher on the 2003-04 4Runners.
Hence, the later model-year vehicles (post 2002 model year) are more stable than the
earlier model-year vehicles. Thus, one would expect the 2003-04 4Runners to be
involved in fewer rollover crashes than the earlier models, even if the newer models are
hypothetically not equipped with ESC. For that reason, the 2003-04 model years were
not included in the analysis.
10
Lexus changed their RX300 model to RX330 in 2004, the
new model was included in the analysis.
The Mercedes-Benz ML320 – Mercedes’ first ever U.S. SUV model – came on the
market in 1998 but was not equipped with ESC. A year later, Mercedes-Benz had made
10
Charles Farmer, in his peer review of this report, recommended the exclusion of 2003-2004 Toyota
4Runners.

10
ESC standard equipment in all their SUV models. We could have included only the
ML320 model in the analysis – since the model was still available in 2004; however, we
decided to include other Mercedes SUV models in the analysis to increase our sample
size.
Table 6: "Similar" Make-Model Comparison of LTVs In Model Years
With ESC and Without ESC
Make Model
Model Years
with
No ESC
Make Model
Model Years
with
ESC (Standard)
Infiniti QX4 2WD
Infiniti QX4 4WD
2002-2003
2002-2003
Infiniti FX35 AWD
Infiniti FX45 AWD
Infiniti QX56 4x2
Infiniti QX56 4x4
2003-2004
2003-2004
2004
2004
Land Rover Range
Rover
2001-2002 Land Rover Range Rover 2003-2004
Lexus RX300 1999-2000 Lexus RX300
Lexus RX330
2001-2003
2004
Toyota 4Runner 4x2 1999-2000 Toyota 4Runner 4x2 2001-2002
Toyota 4Runner 4x4 1999-2000 Toyota 4Runner 4x4 2001-2002
Table 7: "Similar" Make-Model Comparison of Mercedes-Benz LTVs In Model Years
With ESC and Without ESC
Make Model
Model Years
with
No ESC
Make Model
Model Years
without
ESC (Standard)
ML320
1998 ML320
ML350
ML430
ML500
ML55
1999-2004
2003-2004
1999, 2001-2002
2002-2004
2000,2004
CRASH DATA (STATE AND FARS)
Once specific make, model, and model year of vehicles – equipped with ESC and those
not equipped with ESC – were selected for passenger cars and LTVs, those vehicles can
then be identified in the crash data for analysis. In general, a large sample of crash-
involved cars from the selected models is desirable to statistically estimate the effect of
ESC in reducing crashes. The best source of data available to NHTSA for this analysis is
the State data files maintained by the agency’s National Center for Statistics and Analysis
(NCSA). NCSA currently receives crash data from 28 States and maintains these data
files for calendar years 1989 and onward. Since ESC is currently not required safety
equipment, its presence in crash-involved vehicles is not encoded as a separate field in
11
the police reports. However, we can identify the make, model, and model year of each
crash-involved vehicle from the State data files by decoding the Vehicle Identification
Number (VIN) – if such information is available.
Twenty-one States were excluded from the analysis for various reasons. For instance,
Alabama, Arkansas, Colorado, Delaware, Indiana, Minnesota, Montana, South Carolina,
Texas, and Virginia do not have VIN information in their files. Georgia, Michigan, North
Carolina, New York, and Washington were excluded because NHTSA does not have
their files beyond calendar year 2000, a critical year in the analysis because the majority
of our passenger car sample consists of Mercedes-Benz and BMW vehicles – the first two
manufacturers that offered ESC on all their models by 2000 and 2001, respectively.
Thus, without the post 2000 data, our data sample would consist of mostly crashes from
non-ESC vehicles. Kansas, New Mexico, and Ohio were not uniform in reporting VIN,
having a low percentage of VIN in some years and a high percentage in others. Utah and
Wyoming are States with small numbers of crashes. Maryland data in nearly half of the
reported cases do not indicate the contributing circumstances for the vehicles involved in
the crashes. We must have this information to 1) determine which vehicle was
responsible for the crash and which was not and 2) classify each vehicle’s involvement as
either the control group or response group (relevant) involvement.
As a result, data from seven populous States (California, Florida, Illinois, Kentucky,
Missouri, Pennsylvania, and Wisconsin) were used in the analysis. These States (except
California) consistently have a high percentage of VIN information in their data files
(Table 8). California does not have VIN information in its data files. Thus, we were not
able to identify (from the VIN) specific make-models that had ESC and those that did
not, but we included California in the analysis because it is a large State with large
numbers of crash data. We know that Mercedes-Benz first installed ESC in certain S
class models and had made it standard equipment in all their passenger car models by
2001. Mercedes-Benz did have a few models that had ESC as optional equipment prior
to 2001. As previously mentioned, we did examine vehicles with ESC as optional
equipment under the assumptions that those vehicles did not have ESC, and the initial
results indicated that the additional data did not make a big difference in the overall
effectiveness. Thus, for the analysis of crash data in California, we assumed that all
Mercedes-Benz passenger car models prior to 2000 did not have ESC at all. As for their
SUV models, Mercedes-Benz installed ESC in all their models from model years 1999
and onward. Thus, only the 1998 Mercedes-Benz SUV models did not have ESC. As a
result, in the California analysis, we were able to analyze crashes that involved only
Mercedes-Benz vehicles – because we were able to identify those vehicles using the
variables MAKE, MOD_YR (model year), and CHP_TYP (California Highway Patrol
vehicle type – to differentiate cars from SUVs).
Although the number of vehicles involved in fatal crashes is relatively small, ESC is
believed to be highly effective in reducing fatal crashes. If so, even a relatively small
sample size will suffice for statistically significant effects. Currently available crash data
from Fatality Analysis Reporting System (FARS) from calendar years 1997-2004 were
used for the fatal crash analyses. FARS data files consistently have high percentage of

12
VIN information in their data files (97% or better). Thus, the make, model, and model
year of fatal crash-involved vehicles can be decoded from the VIN information.
Table 8: Percentage of VIN Information by State and Calendar Year
State
Calendar
Year
1997
Calendar
Year
1998
Calendar
Year
1999
Calendar
Year
2000
Calendar
Year
2001
Calendar
Year
2002
Calendar
Year
2003
Florida 90% 90% 90% 89% 88% 90% 90%
Illinois 86% 88% 87% 77% 80% 87% -
Kentucky 95% 95% 92% 97% 97% 97% -
Missouri 84% 87% 87% 88% 87% 93% 93%
Pennsylvania 93% 94% 94% 94% 95% - 95%
Wisconsin 91% 91% 90% 91% 90% 90% 90%
Since NCSA typically receives crash data from the States two years after or even longer
in some States, our State data analyses consist of crash data from calendar years 1997-
2003 for Florida, 1997-2002 for Illinois, 1997-2002 for Kentucky, 1997-2001 and 2003
for Pennsylvania, and 1997-2003 for Wisconsin – Table 9. Currently, the 2003 Illinois,
2003 Kentucky, and 2002 Pennsylvania crash files are not available. Only data from
calendar years 2001-2003 were included in the California analysis because we could not
distinguish (from the “vehicle type” variable in the data files prior to 2001) between
crashes involving passenger cars and those involving SUVs. Post-2000 California data
files differentiate passenger car and SUVs crash involvements. As for the fatal crash
analyses, FARS data files are generally available one year after. Thus, our FARS data
analysis consists of fatal crash data from calendar years 1997-2004.
Table 9: Calendar Years of Crash Data By State
State Calendar Years
California 2001-2003
Florida 1997-2003
Illinois 1997-2002
Kentucky 1997-2002
Missouri 1997-2003
Pennsylvania 1997-2001, 2003
Wisconsin 1997-2003
ANALYSIS DATABASES
A) VIN Decode
The analysis databases are crash files initially obtained from the FARS and State data
files and then decoded from the VIN to include only the selected make-models listed in

13
Tables 2-7. In other words, in Florida, Illinois, Kentucky, Missouri, Pennsylvania, and
Wisconsin State data files, vehicle make, model, and model year were decoded from the
variable VIN and matched with the VIN information obtained from the Passenger
Vehicle Identification Manual
11
for the selected make-models. To ensure that there are
no discrepancies in reporting VIN information of crash-involved vehicles, the decoded
model year from the variable VIN had to match with the variable MOD_YR (model year)
taken directly from the State data files. Since California does not have the VIN variable,
the selected Mercedes-Benz make-models were obtained by using the variable MAKE in
the data files. Like other States, California does have the variable MOD_YR in its data
files; thus, the model year of crash-involved vehicles was obtained directly from that
variable.
Like the State data files (except California), FARS data files include both the variables
VIN and MOD_YEAR (model year). Thus, we were able to extract information that
identified the vehicle make, model, and model year from the VIN variable and
established an analysis database consisting of crash data of make-models listed in Tables
2-7. Also, the model year taken from the VIN variable had to correspond with the
variable MOD_YEAR.
The resulting analysis databases – whether they are FARS or State files – are vehicle-
oriented files, with one record for each vehicle that was involved in a crash. Since these
files only contain the selected make-models from Tables 2-7, only vehicles with model
years 1997-2004 for the FARS files and model years 1997-2003 for the State files were
included in the study. One of the critical parameters used in the databases is the
parameter that identifies the presence or absence of ESC. Each record in the databases
will have a variable ESC with a value of 1 for a vehicle that has ESC and a value of 0 for
the one that does not.
B) Crash involvements
Certain crash involvements in which a vehicle 1) was stopped, parked, backing up, or
entering/leaving a parking space prior to the crash, 2) traveled at a speed less than 10
miles per hour (mph), 3) struck in the rear by another vehicle, or 4) was a non-culpable
party in a multi-vehicle crash on a dry road, were considered the control group (non-
relevant involvements) – because ESC would not have prevented the crash. Since ESC
has the ability to detect when a driver is about to lose control of a vehicle and the
capability to automatically intervene to assist that driver and ultimately reduce the
likelihood of a roadside departure, it may provide considerable benefits to crashes that
involve a vehicle running off the road or running out of the lane and hitting other
vehicles. Most run-off-road crashes are single-vehicle involvements, and these
involvements include rollovers and collisions with fixed objects. Other relevant crash
involvements – where ESC could be a factor in the vehicle’s involvement – include
collisions with one or more vehicles due to the driver’s error or the vehicle’s
unsatisfactory performance (known as culpable involvements in multi-vehicle crashes).
These crashes are relevant because they may (but not necessarily) have involved loss of
11
This manual is published yearly by the National Insurance Crime Bureau (NICB).

14
control. Hence, these relevant involvements were included in the analysis and considered
the response group. We also analyzed crashes that involved a pedestrian, bicycle, or
animal – although the vehicles involved in these crashes were not typically at fault. We
would still be interested in knowing whether or not ESC is effective in reducing these
types of crashes.
An important concept in setting up a control- and response-group experiment is that not
every vehicle in the response group necessarily went out of control or stood to benefit
from ESC. For example, a careless driver could steer a vehicle off the road or into the
path of another vehicle with full directional control. Moreover, these crash data generally
do not specify if a vehicle “went out of control” or not. Instead, it is the converse that is
true: if a vehicle did go out of control and get into a crash, it will be in a response group
and not in the control group. The vehicles that could have benefited from ESC are a
subset of the response-group involvements and are not control-group involvements. As
mentioned previously, vehicles that most likely would not benefit from ESC are
considered the control-group involvements – and while this group ideally should be as
unaffected as possible by ESC, the effectiveness estimates are quite dependent on the
choice of the control group. For example, if crashes that were affected by ESC were
included in the control-group involvements, the estimate of ESC effectiveness would be
lower. On the other hand, if crash involvements that were unaffected by ESC were
included in the response-group, the effectiveness estimate would not be compromise as
long as the set-up of a control- and response-group experiment was correct and valid.
The next several sections discuss how these crash involvements were obtained. The
control-group involvements (non-relevant) will be discussed first followed by the
relevant involvements – the response group.
Control group – non-relevant crash involvements
Ideally, only crash involvements where a vehicle was standing still prior to the crash,
moving less than 10 miles per hour, or backing up should be considered the control group
– since we are almost certain that these vehicles were moving too slowly to trigger ESC
and make it a factor in the vehicle’s involvement. But such fatal involvements are few in
number – when compared to the relevant involvements. Thus, a larger sample of vehicles
is needed for the control group. Other non-relevant involvements where ESC is unlikely
to provide any benefit include situations where 1) a vehicle was struck in the rear in a
rear-end collision or 2) a vehicle was involved in a multi-vehicle crash on a dry road but
was not at fault. In both situations, the motion of this vehicle is not what precipitated the
crash, and this vehicle definitely did not hit something else because it had gone out of
control.
In FARS, vehicle “maneuver” and “travel speed” prior to the crash were used to define
one portion of the control-group involvements in which a crash-involved vehicle was
either at a complete stop or moving at a low speed – less then 10 miles per hour. In
addition, the maneuvers “backing up”, “parking”, or “leaving a parking space” indicate
the vehicle was moving slowly (most likely less than 10 mph) even if FARS does not
15
specify a travel speed. The other portion of the control group includes vehicles that are
considered a non-culpable party in a fatal multi-vehicle crash on a dry road. To
determine whether or not a vehicle was at fault, related factors such as the driver’s
physical and mental condition, attitude, and driving actions as well as the condition of the
vehicle and roadway (prior to the crash) were taken into consideration. These factors are
coded in FARS and State data files. Essentially, a vehicle is in the control group if none
of these factors were present. Multi-vehicle crash involvements will be discussed
separately in the next section.
In theory, “not at fault” involvements on wet roads should be in the control group.
However, given that many involvements follow loss of control, and given some
uncertainty as to the accuracy of the “fault” determination, those involvements were not
assigned to the control group.
Finally, in a front-to-rear collision (neither vehicle backing up), we will always assign the
rear-impacted vehicle to the control group and the frontally impacting vehicle to the
response group.
As for the States, every State has its own unique way of coding vehicle “maneuver”,
“speed”, and initial “point of impact”, and not every State includes these variables in their
data files. Similar to FARS, contributing circumstances relating to the driver, vehicle,
and roadway were used to determine which vehicle was responsible for the crash and
which was not. If a State has a variable that indicates whether or not the vehicle’s driver
was charged with a moving violation, then we also used that variable to classify the
vehicle’s involvement (culpable or non-culpable) in a multi-vehicle crash. Again, not all
variables are included in every State, and even the same variables are not coded exactly
the same in each State. Thus, depending on what crash information is available in each
State, the control group used in each of the State data analyses includes different types of
non-relevant crash involvements. But at least the definitions for each of these types of
involvements are made as similar as possible.
The definitions used in all the State data analyses for “stopped”, “parked”, “backing”, and
“parking” maneuvers are self-explanatory and were taken directly from the variable
VEH_MAN1 in the State data files. If a State also reports the speed of a vehicle (variable
SPEED) prior to the crash, then the crash-involved vehicle with a speed ranging from 0 to
10 mph would be included in the control group as well. Similar to the control group used
in the FARS analysis, the multi-vehicle crash involvements had to occur on dry roads and
be non-relevant (non-culpable) – in order for those involvements to be included in the
control group for the State data analyses. The next section will discuss in detail the
different types of multi-vehicle crash involvements used in the FARS and State analyses.
Classification of multi-vehicle crash involvements (control and response group)
Multi-vehicle crash involvements were classified as either culpable or non-culpable based
on what information is available in the data files. In many crashes that involve two motor
vehicles in transport, one vehicle can be identified as responsible for the crash, and the

16
other one not. In some State files this is almost a hard-and-fast rule, with one culpable
and one non-culpable vehicle in nearly every crash, but in other States there may be many
crashes where none or sometimes even all the vehicles are judged culpable. In multi-
vehicle crashes other than front-to-rear collisions, the action of the driver, the
characteristic of the vehicle, the condition of the roadway, or simply the traffic violation
charged were taken in account to determine which vehicle(s) (if any) contributed to the
crash and which did not. In general, the vehicle’s involvement – where the driver in that
vehicle was distracted or under the influence of drugs and/or alcohol, drove carelessly or
aggressively, failed to yield right-of-way, performed an improper turn, backing, passing,
or lane change, followed too closely, disregarded a traffic signal, sign, or other traffic
control, or exceeded the stated speed limit – was considered the most likely to cause the
crash. Other contributing circumstances include the condition of the vehicle’s tires (i.e.,
worn, blowout, puncture, etc.) or the malfunction of the vehicle’s brake systems or the
steering mechanism prior to the crash. Although certain roadway conditions (i.e., wet,
slush, snow, icy, sand, dirt, oil, etc.) might have caused the driver to lose control of the
vehicle and run off the road or hit another vehicle, the striking vehicle would still be
considered the culpable party. Furthermore, if a crash-involved vehicle in which the
driver were charged with a traffic violation, then that vehicle would be considered the
offender. Other contributing factors – whether they are driver, vehicle, or roadway
contributing circumstances – were not considered evidence of culpability. As an
exception to this approach, in a two-vehicle front-to-rear collision, neither vehicle
backing up, the collisions are identified by MAN_COLL=”rear-end” on the accident level
and IMPACT1 (or its equivalent) on the vehicle level: one vehicle has frontal damage
and the other, rear damage. The vehicle with frontal damage (known as rear-end striking)
will always be classified as the culpable party, and the one with rear damage (known as
rear-end struck) will be non-culpable. The criteria for determining culpability in the
FARS analysis are similar to those used in the State analysis. In addition to the ideal
control-group involvements (i.e., vehicle was parked, stopped, or traveled at very slow
speed), the control-group also included non-culpable involvements in multi-vehicle
crashes on dry roads.
Up until now, we have discussed all control-group involvements in which a crash-
involved vehicle was 1) standing still, 2) moving less than 10 miles per hour, 3) backing
up, 4) parking or leaving a parked position, 5) being struck in the rear by another vehicle,
or 6) non-culpable in a multi-vehicle crash on a dry road. We have also talked about
certain relevant involvements (i.e., response group) where 1) a crash-involved vehicle
was considered a culpable party in a multi-vehicle crash on any roads (dry or wet) and 2)
ESC could play a critical role in preventing those crashes.
Categories of single-vehicle crashes
Now, let us discuss further other relevant involvements – mainly crashes that involve
only one motor vehicle in transport – single-vehicle crashes. In most single-vehicle
involvements – whether they are fatals or non-fatals – the case vehicle either rolled over
or hit a fixed object. Those incidents will most likely occur when the vehicle
unintentionally
leaves the travel lane (runs off the road), which is an indication of a

17
driver’s error due to loss of steering and/or directional control of the vehicle, because it is
very unlikely for a vehicle (even for the high center-of-gravity vehicle) to tip over or hit a
fixed object while it is still in the travel lane and under control. In other single-vehicle
involvements where the driver intentionally
steered the vehicle away from the incoming
object (i.e., pedestrian, bicycle, or animal) to avoid hitting the object but ended up hitting
it, the driver is typically not at fault
in this case, but the involvement is still considered
relevant because ESC could perhaps play a role in the vehicle’s involvement.
Run-off-road crashes involve vehicles that travel out of the lane – where they may or may
not yaw out of control, leave the roadway, and eventually roll over and/or hit one or more
natural or artificial objects along or off the roadside – such as trees, guardrails,
embankments, etc. They can also occur on the median of a divided roadway or on the
other side of a non-divided roadway. Run-off-road crashes typically involve a single
motor vehicle in transport – although a moving vehicle hitting a parked vehicle could also
be considered a multi-vehicle involvement. For the purpose of analysis, those
involvements are treated as single-vehicle involvements.
We know from our preliminary study, as well as studies by other researchers that ESC
appears to provide significant benefits related to single-vehicle crashes – especially those
that are likely to have involved yawing: rollovers and side impacts with fixed objects.
“Rollover” generally involves a vehicle that went out of control, started to yaw while it
was still on the road, and eventually rotated 90 degrees or more, side-to-side or end-to-
end, as a result of a tripping mechanism when it left the roadway. “Side impact with a
fixed object” usually indicates a vehicle that left the roadway, possibly after yawing out
of control, and collided with a fixed object. We were able to define these crash
involvements using the “first harmful event” variable at the accident level and the “initial
point of impact” variable at the vehicle level. These variables are coded in the FARS and
State data files.
In the 2004 NHTSA’s report, we studied ESC by looking at its effectiveness in reducing
single-vehicle crashes as a whole and excluding crashes that involve a vehicle colliding
with a pedestrian, bicycle, or animal. In other words, the response group (used in the
2004 study) excluded all crash involvements with a pedestrian, bicycle, or animal and
included all other involvements with one motor vehicle in transport as single-vehicle
crashes. In this follow-up study, we not only included pedestrian, bicycle, and animal
crashes in our study but also looked at other single-vehicle crashes separately. In other
words, we analyzed separately – the effectiveness of ESC in reducing 1) rollovers, 2) side
impacts with fixed objects 3) other run-off-road crashes, 4) pedestrian, bicycle, and
animal crashes, and 5) other single-vehicle crashes (such as collisions with parked cars,
impacts with thrown or falling objects, undercarriage scrapes, or first-event fires).
Rollovers, side impacts with fixed objects and other run-off-roads are considered “all
run-off-road” crashes, and they are a subset of the single-vehicle involvements used in
the 2004 study. “All run-off-road” and “other single-vehicle” involvements used in this
study are what we have used in the 2004 study as “single-vehicle crashes” – since we
excluded pedestrian, bicycle, and animal crashes in that study. However, a direct
comparison of the relative effectiveness of ESC should be made with caution since the

18
control groups used in the two studies are not the same – as already discussed in the
previous section. In this study, we also included culpable involvements in multi-vehicle
crashes on all roads as part of the response group – because ESC could be a factor in the
vehicle’s involvement. We also calculated the effect of ESC on all crash involvements,
including the control-group involvements as well as the relevant involvements.
2X2 CONTINGENCY TABLE ANALYSIS
This study consists of a series of analyses of crash data from currently available State and
FARS databases. Crash data from calendar years 1997-2003 from seven States as well as
FARS data from calendar years 1997-2004 were used in the analysis. The analysis then
compares specific make-models of passenger cars and LTVs with ESC versus earlier
versions of similar make-models, using non-relevant crash involvements as a control
group, essentially creating 2x2 contingency tables of crash involvements (control group
and response group) of vehicles with ESC and those without ESC. A general notation of
a 2x2 contingency table is shown below in Table 11.
Table 11: General Notation for a 2x2 Contingency Table
Type of crash
involvement
Vehicles
Without ESC
Vehicles With
ESC
Totals
Control-group
(non-relevant crashes)
a b
a + b
Response group
(relevant crashes)
c d c + d
Total a + c b + d a + b + c + d = N
To detect if ESC is effective, we considered and tested the null hypothesis that the ratio
of d to c is the same as the ratio of b to a. To calculate the effectiveness of ESC, first, we
compute the ratios of relevant crash involvements to control-group involvements. Then,
we compute the percentage reductions in these ratios in vehicles with ESC versus earlier
versions of similar make-models without ESC. These calculations are illustrated below
by the formula:
essEffectiven
(%)
=
100)]}//()/[(1{
×
−
abcd
To test for statistical significance of the effectiveness of ESC, we used the chi-square
statistic )(
2
χ
for the 2x2 table.
For a 2x2 contingency table, the degrees of freedom are always 1. For a two-sided 95%
confidence level (a conventionally accepted significance level) and degrees of freedom
equal to 1, a chi-square statistic has to exceed 3.843 – which indicates that the two

19
distributions are not the same – to reject the null hypothesis and accept our hypothesis
that the ratio of relevant to control-group crashes is lower in the ESC-equipped vehicles
than in the comparison vehicles without ESC. We will also accept as “statistically
significant” a one-sided 95% confidence level, when chi-square exceeds 2.71. NHTSA
evaluations of safety equipment customarily employ the more lenient one-sided test when
there is a clear expectation that the effect of the equipment will be in the “right” direction
(saving lives, preventing crashes) or, at worst, zero. It is unlikely to be negative. Only in
situations where there is no realistic a priori expectation of an effect in either direction do
we rely exclusively on the more stringent two-sided test.
The next several sections will show 2x2 contingency tables of different types of crash
involvements (FARS and State files) for vehicles with ESC versus those with no ESC.
As previously discussed, the control group includes crash involvements in which a
vehicle was standing still prior to the crash, moving less than 10 mph or backing up,
struck in the rear, or non-culpable party in a multi-vehicle crash on a dry road. The
tables will also show different types of relevant crash involvements such as single-vehicle
run-off-road, other single-vehicle collision, culpable involvement in a multi-vehicle
collision, and collision with a pedestrian, bicycle, or animal. Run-off-road involvements
such as side impacts with fixed objects, rollovers, and other run-off-roads will also be
included in these tables. All run-off-road involvements discussed in this study are single-
vehicle involvements. In addition, the effectiveness of ESC and the chi-square statistic of
each type of relevant involvement will be calculated and illustrated in these tables.
Lastly, the overall effectiveness of ESC on all crash involvements (including the
culpable, non-culpable, and control-group involvements) will be shown in these tables –
to demonstrate the overall effect of ESC since these relevant involvements consist of only
a fraction of all the involvements. Thus, the actual effectiveness will always be less
when considering all crash involvements.
12
For instance, if the effectiveness of ESC is
estimated to be 30 percent for the relevant involvements (i.e., all run-off-roads, other
single-vehicle collisions, collisions with pedestrians, bicycles, or animals, and all
culpable multi-vehicle collisions), which are 50 percent of all crash involvements, then
the effectiveness on all crash involvements is reduced to
(0.30 x 0.50) x 100 = 15 percent
As previously mentioned, the control group includes not only crash involvements in
which a vehicle was standing still prior to the crash, moving at a very low speed, or
backing up, but also other involvements where a vehicle was considered a non-culpable
party in a multi-vehicle crash on a dry road. For completeness, these tables will also
show other multi-vehicle involvements for vehicles with ESC and those without ESC –
so that the sum of all the involvements (control group, all run-off-road, other single-
12
For the analysis of fatal crashes obtained from the FARS database, all crash involvements refer (in this
study) to all types of fatal crash involvements. For the analysis of police-reported crashes obtained from
the State data files, all crash involvements
also refer to all types of crash involvements including not only
fatal
but also non-fatal crash involvements (i.e., property damage, possible injury, non-incapacitating and
incapacitating injury).

20
vehicle, pedestrian, bicycle, animal, culpable involvements as well as other involvement
in multi-vehicle crashes) equals the “total” involvements, which are shown prior to the
last row in each of the tables. But the effectiveness and chi-square statistic will not be
calculated for other multi-vehicle involvements because interpretation of the
effectiveness estimates on those involvements is not clear – since these involvements also
included the non-relevant involvements in multi-vehicle crashes on non-dry roads. As for
the “total” involvements, the effectiveness calculation is also not suitable because they
also include the control-group involvements.
Fatal crashes in passenger cars
Now let us first look at the effectiveness of ESC in fatal crashes in passenger cars. As
illustrated in Table 12, ESC reduced fatal run-off-road crashes by 36 percent
[1 – {(154/217)/(183/166)}]. The reduction is statistically significant with a chi-square
statistic of 8.62 for the 2x2 table consisting of these four cells. It is also evident that fatal
rollover risk is substantially lower with ESC – a statistically significant 70 percent
reduction relative to the control group. Fatal side impacts with fixed objects were
significantly reduced as well – as shown by the 49 percent effectiveness and a 5.89 chi-
square statistic. The negative effectiveness (-36 percent) relative to the control group in
pedestrian, bicycle, and animal crashes suggests possible increase, but the increase is
statistically non-significant. On a more positive note, culpable involvements in multi-
vehicle crashes were also decreased (19 percent), but the reduction is not statistically
significant. Overall, ESC is still very beneficial (14 percent effectiveness) if all crash
involvements were considered – which included culpable, non-culpable, and the control-
group involvements. To calculate the overall effectiveness, the sum of all run-off-roads,
other single-vehicle, pedestrian, bicycle, and animal involvements, as well as culpable
and non-culpable involvements in multi-vehicle crashes must first be calculated for
vehicles with ESC and those with no ESC [(154+3+69+157+76=459) and
(217+6+46+176+65=510), respectively]. The effectiveness in these non-control group
involvements relative to the control-group involvements can then be calculated [1-
{(459/183)/(510/166)} = 18 percent]. The effect of ESC on all fatal crash involvements
for passenger cars can finally be determined by multiplying the effectiveness in non-
control group involvements by the proportion of the total crash involvements that were
relevant [18 x (510/676) = 14 percent]. The effect of ESC on all crash involvements is
not statistically significant because the effect on all non-control group crash involvements
is not.
As previously discussed, “all run-off-road” and “other single-vehicle” involvements
used in this study are what we have categorized in the 2004 study as “single-vehicle
crashes” – which did not include pedestrian, bicycle, and animal crashes. For
comparison purpose (though the control groups used in the 2004 study and in this study
are not the same), we also included in the analysis tables the effectiveness estimates of
ESC in reducing single-vehicle crashes except those involving pedestrians, bicycles, or
animals. The results from this study (shown in Table 12) suggest that ESC reduced fatal
single-vehicle crash involvements of passenger cars by 36 percent – if pedestrian,
bicycle, and animal crashes were excluded – and the reduction is statistically significant.

21
Table 12: Effect of ESC on Fatal Crashes in Passenger Cars
(FARS: 1997-2004)
Type of fatal crash involvement
Vehicles
with no
ESC
Vehicles
with ESC
Effectiveness
*Chi-
square
Value
Fatal
Crashes
Fatal
Crashes
(%)
Control group 166 183
All run-off-road 217 154 36 8.62
Side impact with fixed object 41 23 49 5.89
Rollover 36 12 70 12.71
Other run-off-road 140 119 23 2.50
Pedestrian/bicycle/animal 46 69 -36 1.99
Other single vehicle 6 3 55 1.28
Culpable multi-vehicle 176 157 19 1.91
Other multi-vehicle*** 65 76
All non-control group involvements 510 459 18 2.64
All crash involvements 14
Total 676 642
Single-vehicle crashes** 223 157 36 9.04
* For the 2x2 table formed by this row and the “control group” row.
** excludes pedestrian, bicycle, animal crashes.
*** includes involvements that are not culpable but are not part of the control-group.
Fatal crashes in LTVs
For LTVs (the majority of the analysis sample consists of SUVs), ESC is highly effective
in reducing fatal run-off-road crashes (70 percent effectiveness, chi-square statistic
29.90), especially rollovers (88 percent) – Table 13. In this analysis, ESC has little
observed effect on crashes that involved pedestrians, bicycles, or animals. Culpable
involvements in fatal multi-vehicle crashes significantly declined (34 percent
effectiveness; chi-square statistic 3.64) in LTVs with ESC. The overall effectiveness in
all fatal crash involvements is a positive 28 percent – which indicates a substantial benefit
with ESC in reducing all fatal crashes in LTVs. Similar to the result from the 2004 study,
ESC is highly effective in reducing single-vehicle crashes involving LTVs – as shown in
Table 13 by the positive 63 percent effectiveness, and 23.32 chi-square statistic.

22
Table 13: Effect of ESC on Fatal Crashes in LTVs
(FARS: 1997-2004)
Type of fatal crash involvement
Vehicles
with no
ESC
Vehicles
with ESC
Effectiveness
*Chi-
square
Value
Fatal
Crashes
Fatal
Crashes
(%)
Control group 153 95
All run-off-road 191 36 70 29.90
Side impact with fixed object 15 6 36 0.78
Rollover 106 8 88 37.56
Other run-off-road 70 22 49 6.16
Pedestrian/bicycle/animal 56 37 -6 0.06
Other single vehicle 6 9 -142 2.78
Culpable multi-vehicle 108 44 34 3.64
Other multi-vehicle*** 69 40
All non-control group involvements 430 166 38 8.96
All crash involvements 28
Total 583 261
Single-vehicle crashes** 197 45 63 23.32
* For the 2x2 table formed by this row and the “control group” row.
** excludes pedestrian, bicycle, animal crashes.
*** includes involvements that are not culpable but are not part of the control-group.
Effectiveness confidence bounds in various fatal crash involvements
Now that we have discussed ESC effectiveness in various fatal crash involvements in
passenger cars and LTVs, let us discuss further the confidence bounds for certain
effectiveness estimates that are statistically significant. The entries in Table 11 will be
used to produce an approximate sense of sampling errors and confidence bounds. As
previously explained, the two numbers in the table, a and b, are counts of non-relevant
crash involvements (control group) while the other two numbers, c and d, represent
counts of relevant involvements in various crash modes – in vehicles that are equipped
with ESC versus earlier versions of similar make-models that are not. These numbers can
be considered independent Poisson variates.
13
As discussed, the effectiveness statistic in
various crashes
(
)
(
)
[
]
a
b
c
d
E ÷−=−= 1
ˆ
1
θ
is based sample odds ratio,
θ
ˆ
.
The sampling distribution of the odds ratio can be highly skewed even for moderately
large sample sizes. On the other hand, the log transform of the sample odds ratio, log
θ
ˆ
,
13
Agresti, A. (2002) Categorical Data Analysis, Wiley, New York, pp.16-25.

23
has a less skewed sampling distribution and thus, is more symmetric. For large sample
sizes, the distribution can be approximate to a normal distribution with a mean of log
θ
and a standard deviation often referred to as asymptotic standard error and denoted by
ASE, of
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
=
dcba
ASE
1111
)
ˆ
(log
θ
Taking 1.645 standard deviations on either side of the log
θ
ˆ
yields approximate
confidence bounds (two-sided α = .10, i.e., 90 percent bounds):
)
ˆ
(log645.1
ˆ
log
θθ
ASE±
The confidence intervals can then be transformed back by using the exponential function
to form the confidence interval for the odds ratio and subtracting from 1 to calculate
effectiveness estimates.
Tables 14 and 15 show not only the estimates and chi-square statistics but also the
confidence bounds of the effects of ESC for the following crash involvements: all run-
off-road, rollover, culpable multi-vehicle, single-vehicle (excluding pedestrian, bicycle,
animal crashes), and all crash involvements – in passenger cars and LTVs, respectively.
In Table 14, the effectiveness statistic in all run-off-road crashes is 1 – 0.6438 = 0.3562,
which is based on a sample odds ratio (154/217) / (183/166) = 0.6438. The natural log of
the sample odds ratio equals log (0.64) = -0.4404 and its asymptotic standard error equals
[1/166 + 1/183 + 1/217 + 1/154]
.5
= 0.1503. A 90 percent confidence interval for the
sample log odds ratio equals
),1503.0(645.14404.0
±
− or (-0.6877, -0.1932). The
corresponding confidence interval for the sample odds ratio is
[]
).8243.0,5027.0()1932.0exp(),6877.0exp(
=
−
−
Consequently, the confidence bounds for the effectiveness estimate is
[]
=
−
− 100*)5027.01(,100*)8243.01( (18 percent, 50 percent).
Using the same approach, 69 percent effectiveness in rollovers yields approximate
confidence bounds (46 to 83 percent fatality reduction). A non-significant 36 percent
increase in crashes involving pedestrians, bicycles, or animals suggests that the
effectiveness of ESC is between -95 and 5 percent. The reduction estimates are between
-4 and 37 percent for all culpable involvements in fatal multi-vehicle crashes. For all
fatal crash involvements in passenger cars, the confidence bounds for the reduction (14
percent) are estimated to be 0 to 26 percent. For a 36 percent reduction in single-vehicle
crashes involving passenger cars (excluding pedestrian, bicycle, animal crashes), the
confidence bounds are between 18 and 50 percent.

24
Due to higher chi-square statistics for the effectiveness estimates (smaller standard
deviations) in certain fatal crash involvements in LTVs (specifically in all run-off-roads
and rollovers), the confidence bounds are tighter in LTVs than in passenger cars. For
instance, in all fatal run-off-roads, the confidence bounds for the fatality reduction are 56
to 80 percent in LTVs as compared to 18 to 50 percent in passenger cars. Similarly, the
effect of ESC in reducing fatal rollover crashes is so large that the confidence bounds
range from 77 to 94 percent. Since the observed effect of ESC in reducing crashes
involving pedestrians, bicycles, or animals crashes is negligible and non-significant, the
confidence interval is between -60 and 29 percent. The reduction in culpable fatal multi-
vehicle crash involvements in LTVs, on the other hand, is not as large as the reductions in
various run-off-road involvements; thus, the confidence bounds are between 6 and 54
percent. For all types of fatal crashes in LTVs, the 28 percent effectiveness yields
approximate confidence bounds, 13 to 41 percent fatality reduction. Last but not least,
the reduction in single-vehicle crashes (not including pedestrian, bicycle, animal crashes)
for LTVs is expected to be somewhere between 48 and 74 percent.
Table 14: Effectiveness Confidence Bounds
in Certain Fatal Crash Involvements in Passenger Cars
Type of fatal crash
involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Confidence
Bounds
Chi-
square
Value
Fatal
Crashes
Fatal
Crashes
(%) (%)
Control group 166 183
All run-off-road 217 154 36 18 to 50 8.62
Rollover 36 12 70 46 to 83 12.71
Pedestrian/bicycle/animal 46 69 -36 -95 to 5 1.99
Culpable multi-vehicle 176 157 19 -4 to 37 1.91
All crash involvements 14 0 to 26
Single vehicle crashes* 223 157 36 18 to 50 9.04
* excludes pedestrian, bicycle, and animal crashes.

25
Table 15: Effectiveness Confidence Bounds
in Certain Fatal Crash Involvements in LTVs
Type of fatal crash
involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Confidence
Bounds
Chi-
square
Value
Fatal
Crashes
Fatal
Crashes
(%) (%)
Control group 153 95
All run-off-road 191 36 70 56 to 79 29.90
Rollover 106 8 88 77 to 94 37.56
Pedestrian/bicycle/animal 56 37 -6 -60 to 29 0
Culpable multi-vehicle 108 44 34 6 to 54 3.64
All crash involvements 28 13 to 41
Single vehicle crashes* 197 45 63 48 to 74 23.32
* excludes pedestrian, bicycle, and animal crashes.
Thus far, we have seen that ESC is highly effective in reducing fatal crashes – not only in
passenger cars but also in LTVs. Let us now look at the results from the State analyses to
see if these effectiveness rates still hold for the State data analyzed. The State data
samples include fatal and non-fatal crash involvements although the vast majority of the
involvements are non-fatal (i.e., property damage, possible injury, non-incapacitating and
incapacitating injury). With the State data, separate analyses were performed in each of
the selected States. Let us start with the analysis results in California.
Crashes in California
(Passenger cars)
As previously explained, the California data sample only includes Mercedes-Benz
vehicles, because we could not identify other vehicles due to lack of VIN information.
As shown in Table 16, run-off-road crashes in California were reduced by 66 percent in
passenger cars equipped with ESC, and the reduction (relative to the control group) is
statistically significant with a chi-square value of 125.22. Rollover crashes alone were
significantly decreased (76 percent effectiveness; chi-square statistic 15.54). Side
impacts with fixed objects were included in “other run-off-road” involvements because
we could not identify those crashes based on the available information coded in the data
files. Crashes that involved pedestrians, bicycles, or animals in California were
decreased by 73 percent, and the decrease is statistically significant. The reduction (22
percent) of culpable involvements in multi-vehicle crashes is also statistically significant
with chi-square statistic 19.32. For all non-control group involvements, the decrease is
32 percent, and it is statistically significant (a chi-square value of 61.99). When
considering all crash involvements in passenger cars in California, the result showed that
the benefit is quite strong for ESC – 15 percent.

26
Table 16: Effect of ESC on Crashes in Mercedes-Benz Passenger Cars
(California: 2001-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 1688 2510
All run-off-road 331 167 66 125.22
Rollover 25 9 76 15.54
Other run-off-road 306 158 65 113.08
Pedestrian/bicycle/animal 10 4 73 5.65
Other single vehicle 48 60 16 0.78
Culpable multi-vehicle 874 1017 22 19.32
Other multi-vehicle* 151 183
All non-control group involvements 1414 1431 32 61.99
All crash involvements 15
Total 3102 3941
*includes involvements that are not culpable but are not part of the control-group.
(LTVs – mostly SUVs)
As shown in Table 17, ESC is even more effective (81 percent) in reducing run-off-road
crashes in LTVs than in passenger cars, and the reduction is statistically significant.
Particularly, LTVs equipped with ESC decreased the risk of rolling over by 78 percent.
Likewise, those vehicles also reduced the risk of hitting a pedestrian, bicycle, or an
animal by 26 percent although the effect is not statistically significant. Culpable
involvements of LTVs in multi-vehicle crashes in California were reduced by nearly one-
fourth (24 percent). The reduction was even more significant in all culpable
involvements as evidenced by the 40 percent effectiveness and 9.66 chi-square value. In
general, ESC is equally as effective in reducing all crash involvements (16 percent) in
LTVs as in passenger cars.

27
Table 17: Effect of ESC on Crashes in Mercedes-Benz LTVs
(California: 2001-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 106 575
All run-off-road 20 21 81 29.62
Rollover 5 6 78 7.18
Other run-off-road 15 15 82 24.13
Pedestrian/bicycle/animal 1 4 26 0.07
Other single vehicle 6 15 54 2.57
Culpable multi-vehicle 57 235 24 2.29
Other multi-vehicle* 8 48
All non-control group involvements 92 323 35 7.60
All crash involvements 16
Total 198 898
*includes involvements that are not culpable but are not part of the control-group.
Crashes in Florida
(Passenger cars)
All run-off-road crashes in Florida were decreased by 28 percent for passenger cars –
Table 18. The risk of a rollover or a side impact with fixed object was also lowered in
vehicles with a factory installed ESC. In fact, the relative decreases were 14 percent and
43 percent for side impacts with fixed objects and rollovers, respectively. Furthermore,
the effects are statistically significant for all run-off-roads and rollovers. Collisions with
pedestrians, bicycles, or animals and culpable involvements in multi-vehicle crashes also
benefited from ESC as indicated in Table 18 with statistically significant 49 percent and
13 percent effectiveness, respectively. All culpable crashes decreased by 13 percent, and
the decrease is statistically significant. On the whole, ESC is effective in reducing all
crash involvements by 5 percent.
(LTVs – mostly SUVs)
Table 19 shows that ESC reduced all run-off-road crashes in LTVs by 66 percent with
chi-square statistic 50.08. The reduction is equally substantial in rollovers (78 percent
effectiveness and a chi-square value of 16.83). Crashes that involved a pedestrian,
bicycle, or an animal were also decreased (20 percent effectiveness), but the relative
effect is not statistically significant. On the other hand, the effect of ESC in reducing all
culpable involvements in multi-vehicle crashes is statistically significant as evidenced by
the 10 percent effectiveness and a chi-square value of 3.44. Similarly, ESC is quite

28
effective in reducing all non-control group crashes (a 13 percent reduction and chi-square
statistic of 8.74). The overall effect of ESC in reducing all crash involvements in Florida
is slightly higher for LTVs – 6 percent reduction.
Table 18
: Effect of ESC on Crashes in Passenger Cars
(Florida: 1997-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 5104 5441
All run-off-road 422 324 28 18.59
Side impact with fixed object 63 58 14 0.64
Rollover 33 20 43 4.06
Other run-off-road 326 246 29 16.03
Pedestrian/bicycle/animal 82 45 49 13.13
Other single vehicle 401 471 -10 1.88
Culpable multi-vehicle 2259 2105 13 13.96
Other multi-vehicle* 906 856
All non-control group involvements 4070 3801 12 19.71
All crash involvements 5
Total 9174 9242
* includes involvements that are not culpable but are not part of the control-group.
Table 19: Effect of ESC on Crashes in LTVs
(Florida: 1997-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 2993 1655
All run-off-road 257 48 66 50.08
Side impact with fixed object 36 13 35 1.74
Rollover 57 7 78 16.83
Other run-off-road 164 28 69 35.93
Pedestrian/bicycle/animal 34 15 20 0.53
Other single vehicle 298 135 18 3.41
Culpable multi-vehicle 1227 609 10 3.44
Other multi-vehicle* 517 314
All non-control group involvements 2333 1121 13 8.74
All crash involvements 6
Total 5326 2776
* includes involvements that are not culpable but are not part of the control-group.

29
Crashes in Illinois
(Passenger cars)
Statistically significant reductions in all run-off-road crashes (53 percent), especially in
rollovers (80 percent) were also found in Illinois for passenger cars equipped with ESC –
Table 20. The results also showed significant declines not only in pedestrian, bicycle,
and animal crashes (26 percent) but also in crash involvements where the vehicle was
considered the culpable party in a multi-vehicle crash (16 percent). All non-control
group involvements were reduced (13 percent) as well. When we looked at all crash
involvements in Illinois for passenger cars, we found that ESC, by and large, is still fairly
effective – 7 percent reduction.
Table 20: Effect of ESC on Crashes in Passenger Cars
(Illinois: 1997-2002)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectivene
ss
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 3548 2636
All run-off-road 420 146 53 60.63
Rollover 27 4 80 11.15
Other run-off-road 393 142 51 25.53
Pedestrian/bicycle/animal 247 136 26 7.49
Other single vehicle 662 528 -7 1.24
Culpable multi-vehicle 2002 1253 16 17.57
Other multi-vehicle* 1244 899
All non-control group involvements 4575 2962 13 15.56
All crash involvements 7
Total 8123 5598
* includes involvements that are not culpable but are not part of the control-group.
(LTVs – mostly SUVs)
Although the reduction in rollovers in Illinois – which is credited to ESC – was only a
few percentage points higher (87 percent versus 80 percent) in LTVs than in passenger
cars, the decrease in all run-off-road crashes was substantially higher in LTVs than in
passenger cars (80 percent versus 53 percent, respectively) – Tables 20-21. The analysis
results also revealed potential increase (-20 percent) in pedestrian, bicycle, and animal
crashes, but such increase (if any) is not statistically significant since the chi-square
statistic (0.88) does not exceed 3.84. Culpable involvements in multi-vehicle crashes
were also improved (due to ESC) by 28 percentage points, and the improvement is
statistically significant. All non-control group crash involvements were reduced by 22

30
percent as well, and the reduction is also statistically significant – Table 21. Once again,
ESC is quite successful in reducing all crash involvements (13 percent) for LTVs.
Table 21: Effect of ESC on Crashes in LTVs
(Illinois: 1997-2002)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 1252 959
All run-off-road 147 22 80 59.71
Rollover 41 4 87 21.44
Other run-off-road 106 18 78 40.18
Pedestrian/bicycle/animal 60 55 -20 0.88
Other single vehicle 217 165 1 0.00
Culpable multi-vehicle 756 416 28 19.71
Other multi-vehicle* 484 332
All non-control group involvements 1664 990 22 18.52
All crash involvements 13
Total 2916 1949
* includes involvements that are not culpable but are not part of the control-group.
Crashes in Kentucky
(Passenger Cars)
As for Kentucky, Table 22 shows a significant 47 percent reduction in all run-off-road
crash involvements of passenger cars equipped with ESC. Of that, the decrease in
rollovers is 73 percent, although the effectiveness is statistically not significant (1.72 chi-
square statistic) due to limited number of involvements in our data sample (i.e., 7 crashes
total; 6 pre-ESC crashes and 1 post-ESC crash). The effectiveness in passenger car
involvements with pedestrians, bicycles, or animals in Kentucky is negative (-4 percent)
and non-significant (chi-square statistic of 0.02). As for culpable involvements of
passenger cars in multi-vehicle crashes in Kentucky, the effect is positive but non-
significant as well. Likewise, the effect of ESC on non-control group involvements is
positive (10 percent). As a whole, ESC still has a positive influence on all crash
involvements in Kentucky for passenger cars.

31
Table 22: Effect of ESC on Crashes in Passenger Cars
(Kentucky: 1997-2002)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 771 482
All run-off-road 117 39 47 10.80
Rollover 6 1 73 1.72
Other run-off-road 111 38 45 9.59
Pedestrian/bicycle/animal 37 24 -4 0.02
Other single vehicle 30 19 -1 0.00
Culpable multi-vehicle 409 231 10 1.02
Other multi-vehicle* 165 112
All non-control group involvements 758 425 10 1.68
All crash involvements 5
Total 1529 907
* includes involvements that are not culpable but are not part of the control-group.
(LTVs – mostly SUVs)
As for LTVs, ESC is highly effective in reducing all-run-off road crashes, especially
rollovers – Table 23. The reductions are statistically significant with the effectiveness
equals to 77 percent for all run-off-roads and 92 percent for rollovers. On the other hand,
crashes that involved pedestrians, bicycles, or animals, were increased by 21 percent, but
the increase is once again statistically not significant. Although the effectiveness in
culpable involvements in multi-vehicle crashes is also not significant, it is nevertheless a
strong positive effect (17 percent). The effect of ESC on all non-control group crashes is
also positive (17 percent). All in all, ESC is very effective in reducing all LTV crash
involvements in Kentucky as shown by the 9 percent reduction.

32
Table 23: Effect of ESC on Crashes in LTVs
(Kentucky: 1997-2002)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectivene
ss
Chi-
square
value
All
crashes
All
crashes
(%)
Control group 463 208
All run-off-road 95 10 77 20.73
Rollover 28 1 92 10.08
Other run-off-road 67 9 70 12.15
Pedestrian/bicycle/animal 22 12 -21 0.28
Other single vehicle 16 6 17 0.14
Culpable multi-vehicle 257 96 17 1.60
Other multi-vehicle* 106 62
All non-control group involvements 496 186 17 2.27
All crash involvements 9
Total 959 394
* includes involvements that are not culpable but are not part of the control-group.
Crashes in Missouri
(Passenger Cars)
All run-off-road crash involvements in Missouri were also decreased (44 percent) for
passenger cars equipped with ESC – Table 24. Similarly, crash involvements with
pedestrians, bicycles, or animals as well as culpable involvements in multi-vehicle
crashes and all non-control group crashes were reduced by 48 percent, 8 percent, and 17
percent, respectively. Except for the reduction in culpable involvements in multi-vehicle
crashes, all other reductions are statistically significant. We found that ESC was 10
percent effective in reducing all passenger car crash involvements.
(LTVs – mostly in SUVs)
A continuing trend in crash reductions – specifically in all run-off-road crashes – is
observed for LTVs in Missouri – Table 25. The reduction is significant with 80 percent
effectiveness and chi-square statistic of 39.51. ESC also reduced crashes that involved
pedestrians, bicycles, or animals, but the reduction is statistically non-significant because
the chi-square statistic is close to 0. The results also suggested that ESC provides little
benefits (if any) to LTVs – particularly, in culpable involvements in multi-vehicle
crashes, but for all non-control group crash involvement, the benefits are significant (a 16
percent reduction). Overall, all crash involvements decreased by 9 percent.

33
Table 24: Effect of ESC on Crashes in Passenger Cars
(Missouri: 1997-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 1141 915
All run-off-road 232 105 44 21.09
Side impact with fixed object 21 20 -19 0.30
Rollover 14 2 82 6.59
Other run-off-road 197 83 47 22.24
Pedestrian/bicycle/animal 58 24 48 7.43
Other single vehicle 161 98 24 4.15
Culpable multi-vehicle 757 560 8 1.28
Other multi-vehicle* 313 225
All non-control group involvements 1521 1012 17 9.65
All crash involvements 10
Total 2662 1927
* includes involvements that are not culpable but are not part of the control-group.
Table 25: Effect of ESC on Crashes in LTVs
(Missouri: 1997-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with ESC
Effectivene
ss
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 562 283
All run-off-road 150 15 80 39.51
Side impact with fixed object 13 0 100 6.50
Rollover 31 0 100 13.34
Other run-off-road 106 15 72 22.08
Pedestrian/bicycle/animal 27 12 12 0.12
Other single vehicle 71 36 -1 0.00
Culpable multi-vehicle 401 204 -1 0.01
Other multi-vehicle* 158 76
All non-control group involvements 807 343 16 3.04
All crash involvements 9
Total 1369 626
* includes involvements that are not culpable but are not part of the control-group.

34
Crashes in Pennsylvania
(Passenger cars)
For passenger cars in Pennsylvania, ESC has quite an impact on all run-off-road
involvements (40 percent effectiveness, 21.69 chi-square statistic), especially in rollovers
(66 percent effectiveness, 5.23) – as shown in Table 26. Although it is not statistically
significant, observed ESC effectiveness in pedestrian, bicycle, and animal crashes is
negative – as illustrated in Table 26 by the negative 23 percent effectiveness.
Pennsylvania is the first State whose analysis shows a negative ESC effectiveness in
culpable involvements in multi-vehicle crashes, but the effect is statistically non-
significant. Furthermore, ESC has little effect in reducing all crash involvements (1
percent) in Pennsylvania for passenger cars.
Table 26: Effect of ESC on Crashes in Passenger Cars
(Pennsylvania: 1997-2001, 2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 983 553
All run-off-road 431 146 40 21.69
Side impact with fixed object 53 18 40 3.36
Rollover 26 5 66 5.23
Other run-off-road 352 123 38 16.61
Pedestrian/bicycle/animal 62 43 -23 1.04
Other single vehicle 31 24 -38 1.34
Culpable multi-vehicle 731 454 -10 1.53
Other multi-vehicle* 282 183
All non-control group involvements 1537 850 2 0.06
All crash involvements 1
Total 2520 1403
* includes involvements that are not culpable but are not part of the control-group.
(LTVs – mostly SUVs)
Table 27 shows that ESC significantly reduced all run-off-roads in Pennsylvania by 63
percent for LTVs and was even more effective in reducing rollovers – as evidenced by
the 86 percent effectiveness and 18.26 chi-square statistic. We see possible harm with
ESC for crash involvements with pedestrians, bicycles, or animals; however, the effect is
not statistically significant. This analysis showed that ESC has negligible effect on
culpable involvements of LTVs in multi-vehicle crashes in Pennsylvania, but it has quite

35
an effect on all non-control group involvements (22 percent) as well as on crash
involvements (14 percent). These effects are statistically significant.
Table 27: Effect of ESC on Crashes in LTVs
(Pennsylvania: 1997-2001, 2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 355 210
All run-off-road 193 42 63 28.64
Side impact with fixed object 19 8 29 0.63
Rollover 48 4 86 18.26
Other run-off-road 126 30 60 17.71
Pedestrian/bicycle/animal 19 19 -69 2.49
Other single vehicle 13 3 61 2.27
Culpable multi-vehicle 226 132 1 0.01
Other multi-vehicle* 129 70
All non-control group involvements 580 266 22 4.97
All crash involvements 14
Total 935 476
* includes involvements that are not culpable but are not part of the control-group.
Crashes in Wisconsin
(Passenger cars)
Similar to all run-off-road involvements of passenger cars in other States, the
involvements in Wisconsin were significantly decreased – 34 percent effectiveness and
9.58 chi-square statistic – Table 28. In addition to involvements with pedestrians,
bicycles, or animals, culpable involvements in multi-vehicle crashes as well as in all
non-control group crashes decreased – for passenger cars equipped with ESC versus
those not equipped with ESC – as shown by the 23 percent, 16 percent, and 17 percent,
respectively. The decreases are significant in the culpable involvements in multi-vehicle
crashes and in all non-control group crashes. ESC is effective overall in Wisconsin for
passenger cars – as demonstrated in Table 28 with an 11 percent reduction of all crash
involvements.
(LTVs – mostly SUVs)
Likewise, LTVs with ESC are much less at risk of being involved in run-off-road crashes
when compared to vehicles with no ESC – as shown in Table 29 by the 68 percent

36
effectiveness and 32.45 chi-square value. In addition to these single-vehicle crash
involvements, other culpable involvements in multi-vehicle crashes were also
significantly decreased by 27 percent – though the decrease is not as substantial as in the
single-vehicle crashes. ESC had negligible effect on crashes that involved pedestrians,
bicycles, or animals as evidenced by the negative 4 percent effectiveness and 0.02 chi-
square statistic. All in all, ESC is very effective in reducing all crash involvements in
Wisconsin – 23 percent for LTVs.
Table 28: Effect of ESC on Crashes in Passenger Cars
(Wisconsin: 1997-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-square
Value
All
Crashes
All
Crashes
(%)
Control group 705 516
All run-off-road 214 104 34 9.58
Rollover 13 4 58 2.42
Other run-off-road 201 100 32 8.19
Pedestrian/bicycle/animal 120 68 23 2.49
Other single vehicle 57 25 40 4.39
Culpable multi-vehicle 645 395 16 4.28
Other multi-vehicle* 178 147
All non-control group involvements 1214 739 17 6.14
All crash involvements 11
Total 1919 1255
* includes involvements that are not culpable but are not part of the control-group.
Table 29: Effect of ESC on Crashes in LTVs
(Wisconsin: 1997-2003)
Type of crash involvement
Vehicles
with no
ESC
Vehicles
with
ESC
Effectiveness
Chi-
square
Value
All
Crashes
All
Crashes
(%)
Control group 359 231
All run-off-road 162 33 68 32.45
Rollover 50 4 88 21.51
Other run-off-road 112 29 60 17.15
Pedestrian/bicycle/animal 42 28 -4 0.02
Other single vehicle 26 10 40 1.85
Culpable multi-vehicle 310 146 27 5.68
Other multi-vehicle* 128 63
All non-control group involvements 668 280 35 15.16
All crash involvements 23
Total 1027 511
* includes involvements that are not culpable but are not part of the control-group.

37
Crashes in all selected States
At this point, we have comprehensively discussed separate analysis results of the effect of
ESC in reducing relevant crash involvements of passenger cars and LTVs – relative to the
control-group involvements – in each selected State. Let us now try to assess the overall
effect of ESC across these seven States. The easiest way to obtain a single estimate
would be to pool the cases from the States and perform a single analysis. We are
reluctant to analyze the data that way because:
Different States have different crash-reporting thresholds. States with low thresholds
have more reported crash cases per capita, and would account for an unjustifiably large
share of the pooled data.
The make-model mix varies from State to State.
The distribution of crash types varies from State to State, as do the definitions of the
crash types.
Instead, we will use the weighted mean of the sample log odds ratios from the seven
States as the best indicator of the central tendency of the data, and the weighted standard
error of the log odds ratios as a basis for judging statistical significance and estimating
confidence bounds, which will be discussed in the next section. In this section, we will
concentrate only on the overall effects of the systems.
14
The reason for using the mean of the log odds ratios is due to the facts that it is (1) less
affected by extreme values, (2) useful as a measure of central tendency for certain
positively skewed distributions, and (3) an appropriate measure to use for averaging rates
(e.g., crash reduction/increase). The weighted mean is used to take into account the
difference in the sampling distributions among the seven States. The weighted value for
each State is simply the reciprocal of the sum of the reciprocals of the four frequencies
from the 2x2 contingency table. The weighted mean of the log odds ratios is determined
using the PROC MEANS procedure in SAS from the seven log odds ratios and the
weighted value for each of the seven States.
(Passenger cars)
We will first discuss the effects on passenger cars and then on LTVs. Table 30 shows not
only the individual percentage reductions in the ratios of relevant involvements to
control-group involvements – in passenger cars with ESC versus cars of similar
make-models without ESC – in each State, but also the overall reductions – which are
determined by computing the weighted mean of the sample log odds ratios. For example,
for all run-off-road crashes in California involving passenger cars (Table 16), the odds
ratio equals [(167/331) ÷ (2510/1688)] = 0.3393. The log odds ratio is log (0.3393) =
-1.0809. The weighted value equals
(
)
(
)
(
)
(
)
{
}
00.100
167
1
331
1
2510
1
1688
1
1 =+++÷
14
Charles Farmer recommended this approach in his peer review.
38
Using the same approach, the log odds ratios for Florida, Illinois, Kentucky, Missouri,
Pennsylvania, and Wisconsin, are -0.3282, -0.7595, -0.6289, -0.5720, -0.5073, and
-0.4095, respectively. The corresponding weighted values are 171.36, 101.10, 26.62,
63.28, 83.37, and 56.67. The computed weighted mean of the log odds ratios from SAS
program is -0.5969. The weighted mean of the overall effectiveness is estimated simply
by first taking the antilogarithm of -0.5969 and then subtracting [exp (-0.5969) = 0.5505]
from 1, which yields 45 percent effectiveness.
As illustrated in Table 30 in the gray-highlighted column, ESC is most effective in
reducing all run-off-road crashes by 45 percent, particularly in rollovers by 64 percent.
Other single-vehicle crash involvements – where ESC also had an impact – are those that
involved pedestrians, bicycles, or animals, even though the results are inconsistent across
States. Nevertheless, the impact is still positive: 26 percent effectiveness. The table
shows negative overall effectiveness (-2 percent) of ESC in reducing “other single-
vehicle” crashes (such as collisions with parked cars, impacts with thrown or falling
objects, undercarriage scrapes, or first-event fires), and the results are also inconsistent
among the States. Culpable involvements in multi-vehicle crashes received some benefit
from ESC as evidenced by the 13 percent effectiveness. When all crashes (including
culpable, non-culpable, and the control-group involvements) were taken into account,
ESC is still quite effective – as shown by the 8 percent effectiveness. In the State
analyses, we also analyzed the effectiveness of ESC on single-vehicle crashes that did not
involve pedestrians, bicycles, or animals. As shown in Table 30, the reductions of single-
vehicle crashes were observed in each of the States, and the overall reduction (which is
the weighted mean of the reductions in seven States) is 26 percent.
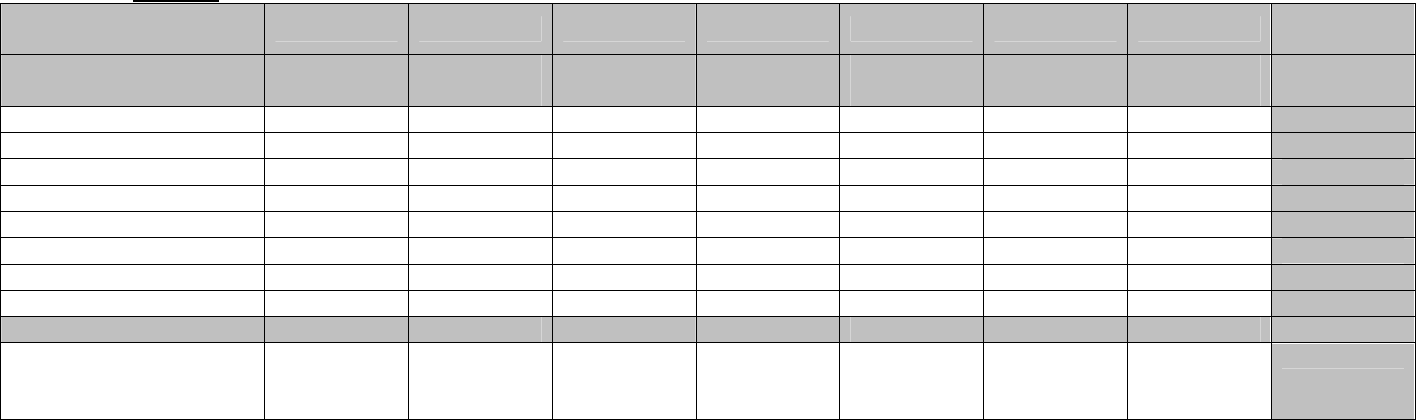
39
Table 30: The Effects and Mean of the Effects of ESC on Various Crash Involvements of Passenger Cars - By State
Type of crash
involvement
CA FL IL KY MO PA WI
*Mean of
States
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Control group
All run-off-road
66 28 53 47 44 40 34
45
Rollover
76 43 80 73 82 66 58
64
Other run-off-road
65 29 51 45 47 38 32
45
Pedestrian/bicycle/animal
73 49 26 -4 48 -23 23
26
Other single vehicle**
16 -10 -7 -1 24 -38 40
-2
Culpable multi-vehicle
22 13 16 10 8 -10 16
13
All crash involvements
15 5 7 5 10 1 11
8
Single vehicle crashes
(excluding pedestrian,
bike, animal crashes)
60 9 16 37 36 35 35
26
* indicates the weighted mean of the effects in all 7 States.
** includes collisions with parked vehicles.
40
(Light-Trucks – mostly SUVs)
ESC was even more effective in reducing run-off-road crashes (relative to the control-
group involvements) for LTVs, especially in rollover involvements – as shown in Table
31 by the 72 percent and 85 percent effectiveness, respectively. In calculating the
weighted mean effect for the rollover reductions in seven States, the crash involvements
in Illinois and neighboring Missouri were pooled because a 100 percent reduction in
Missouri yields an undefined log odds ratio. ESC had a negative effect on pedestrian,
bicycle, or animal crashes. In LTVs, culpable involvements in other single- and multi-
vehicle crashes were also decreased by 12 percent and 16 percent, respectively. Overall,
ESC was also effective in reducing all crash involvements in LTVs. The reduction in
single-vehicle crashes (excluding those involving pedestrians, bicycles, or animals)
involving LTVs is not as high as the reduction in all run-off-road crashes (48 percent
versus 72 percent.

41
Table 31: The Effects and Mean of the Effects of ESC on Various Crash Involvements in LTVs - By State
Type of crash
involvement
CA FL IL KY MO PA WI
*Mean of
States
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Control group
All run-off-road
81 66 80 77 80 63 68
72
Rollover**
78 78 87 92 100 86 88
85
Other run-off-road
82 69 78 70 72 60 60
69
Pedestrian/bicycle/animal
26 20 -20 -21 12 -69 -4
-11
Other single vehicle
54 18 1 17 -1 61 40
12
Culpable multi-vehicle
24 10 28 17 -1 1 27
16
All crash involvements
16 6 13 9 9 14 23
10
Single vehicle crashes
(excluding pedestrian,
bike, animal crashes)
74 40 33 68 54 63 64
48
* indicates the weighted mean of the effects in all 7 States.
** Data in IL and MO were pooled to allow computation of a log-odds ratio.

42
Effectiveness confidence bounds and statistical significance in various crash
involvements
Now, let us discuss confidence intervals for certain effectiveness estimates that are
considered significant crash reductions in passenger cars and LTVs – Tables 32 and 33.
In the State analysis results, we will calculate confidence bounds using weighted mean of
the log odds ratios, weighted standard errors based on the variation of the seven States,
and take 1.943 standard errors for two-sided
10.0
=
α
, i.e., 90 percent bounds, because
1.943 is the 95
th
percentile of the t-distribution with (7-1)=6 degrees of freedom. A
general notation for calculating the confidence interval for the overall effect is illustrated
below by the formula
15
:
Confidence interval = (overall effect)
oddsanofweightedme log
±
t
1,05. −N
(SE)
where
1.
(overall effect)
oddsanofweightedme log
is determined using the approach discussed in the
previous section.
2.
t
1,05. −N
is the t value for a two-sided test (90 percent bounds) and N-1 degrees of
freedom.
3.
N is the number of individual effects.
4.
SE is the weighted standard error of the log odds ratios obtained from the PROC
MEANS procedure in SAS (i.e., the weighted standard deviation of these ratios
divided by
7 , the square root of the number of States).
Let us take one example (all run-off-road crash involvements of passenger cars) and
discuss the statistics in detail. As discussed in the previous section, the weighted mean of
the log odds ratios is -0.5969. The weighted standard error of the log odds ratios
(computed from SAS) is 0.1068. Applying these statistics to the above t-confidence
interval equation produces
90% confidence interval = -0.5969
±
1.943 (0.1068) = -08044 to -0.3894
which translates to (0.4474, 0.6775) in odds ratio by taking the antilogarithm of the
confidence interval estimates (-0.8044, -0.3894). The confidence interval for the overall
effect of ESC on all run-off-road crashes involving passenger cars is (32%, 55%). Using
the same approach, we found the following confidence intervals for other critical
reductions in passenger cars: 50 to 75 percent in rollover crashes, 8 to 41 percent in
crashes that involved a pedestrian, bicycle, or an animal, 7 to 18 percent in culpable
involvements in multi-vehicle crashes, and 5 to 10 percent in all crashes. For single-
vehicle crash involvements (not including collisions with a pedestrian, bicycle, or an
animal), the expected effectiveness is between 10 and 40 percent. The overall
15
Handbook of Probability and Statistics with Tables, Second Edition, McGraw-Hill, Inc., USA, 1970,
pp. 244-245.

43
effectiveness estimates listed in Table 32 are statistically significant because the
confidence bounds are greater than 0.
For LTVs, the confidence bounds for the reductions (listed in Table 33) were also
calculated using the above method. Table 33 shows that the weighted mean of the
effectiveness of ESC in reducing all LTV run-off-crashes is 72 percent, and the 90
percent confidence interval is 65 to 77 percent. As previously discussed, because the
crash involvements in Illinois and neighboring Missouri were pooled for the analysis of
rollovers (Table 31), the number of individual effects (N) is reduced to 6, and the critical
t-value for 6-1 = 5 degrees of freedom is 2.015
16
. Hence, the confidence interval for the
rollover reduction is (79%, 90%). A negative 11 percent effectiveness in crashes
involving pedestrians, bicycles, or animals implies that the expected effectiveness
estimate is between -31 and 6 percent. The confidence bounds for the decrease in
culpable involvements in multi-vehicle crashes are 7-23 percent. The confidence bounds
for the reduction in all crashes in LTVs are between 6 and 14 percent. When we look at
all single-vehicle crashes except the pedestrian, bicycle, and animal crashes, the
confidence interval for the reduction is (35%, 58%). In general, the spread of the sample
distribution determines the range of the confidence interval. In other words, if the
effectiveness estimates are consistent across all studied States, then the spread of the
sample distribution is expected to be small, and hence, the range of the confidence
interval is expected to be small as well – as evidenced by the estimates and the
confidence bounds listed in Tables 32-33. Similar to the effects on passenger cars, the
weighted mean effects on LTVs for run-off-road, rollover, culpable multi-vehicle, and all
crash involvements are statistically significant because the confidence bounds are all
positive. The overall reduction of single-vehicle crashes excluding pedestrian, bicycle,
and animal crashes is also statistically significant. Only the overall effect on crashes that
involved a pedestrian, bicycle, or an animal is not statistically significant because the
estimates from the individual States are inconsistent.
16
Handbook of Probability and Statistics with Tables, Second Edition, McGraw-Hill, Inc., USA, 1970, p.
383.
44
Table 32: The Effects and Mean of the Effects of ESC of Various Crash Involvements of Passenger Cars - By State
Type of
crash
involvement
CA FL IL KY MO PA WI
*Mean of
States
Confidence
bounds
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
All run-off-
road
66 28 53 47 44 40 34
45
32 to 55
Rollover
76
43 80 73 82 66 58
64
50 to 75
Pedestrian/
bike/animal
73 49 26 -4 48 -23 23
26
8 to 41
Culpable
multi-vehicle
22 13 16 10 8 -10 16
13
7 to 18
All crash
involvements
15 5 7 5 10 1 11
8
5 to 10
Single-
vehicle
crashes**
60 9 16 37 36 35 35
26
10 to 40
* indicates the weighted mean of the effectiveness estimates of 7 States.
** excludes pedestrian, bicycle, animal crashes.
Notes:
1) Bold – weighted mean effect is statistically significant.
2) Plain type – weighted mean effect is not statistically significant.

45
Table 33: The Effects and Mean of the Effects of ESC on Various Crash Involvements in LTVs – By State
Type of
crash
involvement
CA FL IL KY MO PA WI
*Mean of
States
Confidence
bounds
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
Effectiveness
(%)
All run-off-
road
81 66 80 77 80 63 68
72
65 to 77
Rollover**
78 78 87 92 100 86 88
85
79 to 90
Pedestrian/
bike/animal
26 20 -20 -21 12 -69 -4 -11
-31 to 6
Culpable
multi-vehicle
24 10 28 17 -1 1 27
16
7 to 23
All crash
involvements
16 6 13 9 9 14 23
10
6 to 14
Single-
vehicle
crashes***
74 40 33 68 54 63 64
48
35 to 58
* indicates the weighted mean of the effectiveness estimates of 7 States.
** A combined effectiveness calculated from crash involvements in IL and MO as 1 State (Tables 21 and 25). E = {1-[((4+0) / (959+283))
÷
((41+31) /
(1252+562))}=0.92.
Only 6 States (N=6) are included for this calculation because the data in IL and MO data were pooled.
*** excludes pedestrian, bicycle, animal crashes.
Notes:
1) Bold – weighted mean effect is statistically significant.
2) Plain type – weighted mean effect is not statistically significant.

46
LOGISTIC REGRESSION ANALYSIS
Logistic regression permits a refinement and check of the basic analyses. Logistic regression by
the GENMOD procedure
17
was used to estimate the effect of passenger car ESC on the
probability that a crash involvement was relevant (specifically the involvement of a vehicle
running off the road) as opposed to being non-relevant (i.e., the control-group involvement),
while controlling for other factors. Estimating the impact of ESC in reducing single-vehicle run-
off-road crashes could be confounded by factors related to the driver, vehicle, roadway, or other
circumstances or by a proportionately different make-model mix in the vehicles without ESC and
the vehicles with ESC. To make certain that the effect of ESC is estimated accurately, variables
were included in the logistic regression to control for those external factors, other than ESC, that
could possibly influence the ratio of run-off-road to control-group crash involvements.
Here is one example of how demographic factors (i.e., driver characteristics) could confound the
effect of ESC. Since ESC is more commonly installed on higher-priced vehicles, ESC-equipped
vehicles are more likely to be driven by a certain group of drivers – perhaps more affluent and
older – than by other segments of the driving population. Although it is unlikely that the
majority of the passenger cars used in our analysis sample were driven by 16-24 year-olds, we
included this group of drivers in our model because they could potentially confound the effect of
ESC in reducing run-off-road crashes. This driver-age category generally has a higher
percentage of drivers considered more aggressive in their driving than others, and thus, their
vehicles are at a higher risk of being involved in run-off-road crashes. Furthermore, based on
historical trends of drivers involved in crashes by sex and crash severity,
18
it is a common
stereotype and many researchers have attempted to test the hypothesis that – male drivers are
more likely to be involved in crashes because they are generally more aggressive in their driving
than female drivers. Thus, driver gender was included in the regression model as well.
Other external factors include whether or not the crash occurred: (1) at night, (2) on a rural
roadway, or (3) on a freeway. These factors could influence the proportion of run-off-road crash
involvements because a driver, in those environment or situations, is more likely to lose control
of a vehicle, and hence, ESC is more likely to be activated. The vehicle make-model group was
also included in the regression model. The age of the vehicle was initially considered, but we
did not include this factor in the final regression analysis, because its effect was not statistically
significant when (1) all independent variables mentioned above were included in the regression
model and even when (2) only variables for ESC and vehicle age were included.
19
The data points in the logistic regressions for passenger cars and LTVs are the FARS driver
fatality cases, each given a weight factor of 1. Cases with unreported age, gender, or roadway
function class (rural or urban) are excluded; so are the drivers younger than 14 years or older
than 97 years. The dependent variable ROR (for run-off-road) – a dichotomous variable with a
17
Allison, P.D. (1999) Logistic Regression Using the SAS System: Theory and Application, Cary, NC: SAS
Institute Inc., pp.82-83.
18
Traffic Safety Facts, 2004, NHTSA Technical Report No. DOT HS 809 919, Washington D.C., 2004, pp.19-20.
19
Charles Farmer, in his peer review, recommended analysis (2) as an additional way to check if vehicle age is a
factor. Claes Tingvall also emphasized the potential importance of vehicle age in the current analysis, and
especially in future analyses as the vehicles without ESC get older.

47
binomial distribution – equals 1 if the crash involvement was a single-vehicle run-off-road and 2
if it was non-relevant (control group). The key independent variable, ESCS indicates whether or
not the crash-involved vehicle had ESC as standard equipment: 1 if ESC was installed and 0 if it
was not. The other independent variables are:
Gender, expressed as DRVMALE (= 1 if the driver is male and 0 if the driver is female).
The driver’s age, expressed as D16_24 (= 1 if the driver is 16-24 years old and 0 otherwise).
Time of day, expressed as NITE (= 1 if 7:00 p.m. – 5:59 a.m., 0 if 6:00 a.m. – 6:59 p.m.)
Roadway function class (RURAL, FREEWAY). RURAL has the value 1 if the crash occurred
on a rural roadway, 0 if the crash occurred on an urban roadway. FREEWAY has the value 1 if
the crash occurred on an interstate, freeway, or expressway and 0 otherwise.
The vehicle make-model group, expressed as a categorical variable (CAR_MFG).
The regression for the analysis of passenger cars is based on 708 FARS fatality cases. The
likelihood-ratio (LR) statistics for TYPE 3 analysis
20
are shown in Table 34. TYPE 3 analysis
was used because of the inclusion of the CLASS variable CAR_MFG in the model. After we
controlled for the important quantifiable human parameters – driver’s age, gender – plus other
variables that are strongly associated with single-vehicle run-off-road crash involvements, the
effect of ESC on fatal run-off-road involvements (relative to the control-group involvements) in
passenger cars is statistically significant with the LR chi-square statistic being 18.39.
21
In fact,
the model predicted that ESC reduced fatal single-vehicle run-off-road crashes by 1 - exp(-
0.7838) = 54 percent because the regression coefficient estimate for ESCS is -0.7838. The
results from the 2x2 contingency table analysis (Table 12) showed a 36 percent reduction in all
fatal run-off-road crash involvements relative to the same control-group involvements used in the
regression analysis. Thus, if we compare those two results, we see that the 2x2 contingency
table approach may be more conservative than the regression analysis method. Hence, the
regression analysis gives us increased confidence that the effectiveness estimates obtained from
our 2x2 contingency table analyses are not biased in favor of ESC.
The regression results from the passenger car analysis supported our assumptions that: (1) male
drivers are at a higher risk of being involved in fatal run-off-road crashes than females, and (2)
the 16-24 year-old group of drivers is also at a higher risk of being involved in fatal run-off-road
crashes when compared to other groups of drivers. These factors are statistically significant – as
indicated by the LR statistics shown in Table 34 (chi-square values 35.45 for DRVMALE and
19.65 for D16_24). Other independent variables (specifically those related to the environment)
that also had statistically significant effects on fatal run-off-road crashes are those that indicate
whether or not the crash occurred at night (NITE) or on a rural roadway (RURAL) – as
evidenced by the LR chi-square statistics 46.13 and 19.23, respectively. The effect of another
factor FREEWAY – which indicates whether or not the crash occurred on a freeway, interstate,
or expressway – is borderline-significant (chi-square = 6.46; Pr>chisq = 0.0111). The vehicle
make-model group (CAR_MFG) is, however, statistically significant – as shown by the 23.14
LR chi-square statistic and 0.0008 Pr>chisq.
20
Allison, P.D. (1999) Logistic Regression Using the SAS System: Theory and Application, Cary, NC: SAS
Institute Inc., p. 27.
21
Results are statistically significant at the 0.05 level when the LR chi-square statistic is greater than 3.84.

48
Table 34: Likelihood-ratio Statistics for TYPE 3 Analysis of the Independent Variables
(FARS: 1997-2004) - Passenger Cars
Source
Degrees of
Freedom
Chi-Square Pr > ChiSq
ESCS 1 18.39 <.0001
DRVMALE 1 35.45 <.0001
D16_24 1 19.65 <.0001
NITE 1 46.13 <.0001
RURAL 1 19.23 <.0001
FREEWAY 1 6.46 0.0111
CAR_MFG 6 23.14 0.0008
For the analysis of LTVs, the regression is based on 471 FARS fatality cases. In this analysis,
the model predicted that ESC reduced fatal single-vehicle run-off-road crashes involving LTVs
by 68 percent because the regression coefficient estimate for ESCS is
-1.1320. Similar to the effects of ESC and other independent variables in the passenger car
regression analysis, the effects of those variables in the LTV analysis (shown in Table 35) are
also statistically significant except for the effect of the vehicle make-model group. Again, the
effectiveness estimate obtained from the regression analysis is similar to the observed estimate
from the 2x2 contingency table analysis – 68 percent versus 70 percent, respectively (Table 13).
Table 35: Likelihood-ratio Statistics for TYPE 3 Analysis of the Independent Variables
(FARS: 1997-2004) - LTVs
Source
Degrees of
Freedom
Chi-Square Pr > ChiSq
ESCS 1 21.31 <.0001
DRVMALE 1 11.89 0.0006
D16_24 1 10.75 0.0010
NITE 1 7.51 0.0061
RURAL 1 18.37 <.0001
FREEWAY 1 21.83 <.0001
CAR_MFG 2 1.19 0.5511
COMPARISON OF 2-CHANNEL AND 4-CHANNEL ESC SYSTEMS
We also compared crash reduction with 2-channel versus 4-channel ESC systems for reasons
already explained in the “background” section. The 4-channel ESC systems have a control
algorithm and means to apply all four brakes individually
whereas the 2-channel systems do not.
In other words, the 2-channel systems are capable of applying brake torque only to the two front
wheels. Hence, the latter systems only have the capability to correct oversteer whereas the
former systems are capable of correcting not only oversteer but also understeer.

49
Table 35 shows passenger car fatalities (single vehicle run-off-road versus control-group
involvements) in vehicles with and without ESC – by system type (2-channel versus 4-channel
systems). We subdivided our FARS data into two groups of make-models: those equipped with
2-channel ESC systems (all GM models selected for the study except the Corvette) and those
equipped with 4-channel ESC systems (all non-GM models selected for the study plus the
Corvette). The make-models used in this analysis (2- versus 4-channel ESC) were identical to
those listed in Tables 2 through 7. There were no make-models that had received both types.
The crash reduction with 2-channel ESC is compared to cars of the same make-models, but in
the model years before they received ESC – and likewise to the make-models that received 4-
channel ESC.
In the 2-channel systems (Category 1), there were 56 fatalities in single-vehicle run-off-road
crashes and 56 fatalities in non-relevant crashes (control group) – in vehicles without ESC, a risk
ratio of 1.000. In vehicles with ESC, there were 16 run-off-road and 41 non-relevant fatalities, a
risk ratio of 0.390. That is a significant 61 percent reduction in single-vehicle run-off-road
fatalities in 2-channel systems relative to the control-group. In the 4-channel systems (Category
2), single-vehicle run-off-road fatalities also decreased, but the decrease is 39 percent and
statistically significant. Additional analyses were conducted to refine and properly characterized
these results, as discussed below.
We can test if the fatality reduction is significantly greater in category 1 (2-channel) than in
category 2 (4-channel) by performing a three-dimensional contingency table analysis. The
difference in effectiveness is not statistically significant, as evidenced by the chi-square of the
three-way interaction term when the CATMOD procedure of SAS is applied to the three-way
table.
22
In fact, the chi-square statistic for the difference in the reduction in fatal single-vehicle
run-off-road crashes between the two ESC systems is 1.35, which suggests that the larger
observed fatality reduction with 2-channel systems (shown in Table 35) is not significantly
different from the observed reduction with the 4-channel system. The reductions in fatal single-
vehicle run-off-road fatalities should be interpreted with caution because of the small number of
fatalities in both samples (2-channel and 4-channel systems) – Table 35. As we have found from
the FARS and State data analyses (discussed in detail in the previous sections), the single-vehicle
run-off-road fatality reduction (due to ESC) for passenger cars is 36 percent (Table 12), and the
run-off-road crash reduction (mostly non-fatal crashes) is 45 percent (Table 30). Based on these
results, both fatal and non-fatal single-vehicle run-off-road reductions are expected to be
somewhere in this range – whether the reduction is associated with 2-channel or 4-channel
systems. Hence, a 61 percent reduction in fatal single-vehicle run-off-road involvements in
vehicles with 2-channel systems is probably an unrealistic estimate and most certainly influenced
by the small sample. Consequently, the difference in the reduction in fatal single-vehicle run-
off-road crashes between the two ESC systems is found to be statistically non-significant (chi-
square value of 1.35) – due to the small samples.
22
For a CATMOD analysis of crash data with statistically significant three-way terms see Morgan, C., The
Effectiveness of Retroreflective Tape on Heavy Trailers, NHTSA Technical Report No. DOT HS 809 222,
Washington, 2001, pp. 29-37, summarized in Kahane (2004), pp. 43-44; SAS/STAT
®
User’s Guide, Vol. 1, Version
6, 4
th
Ed., SAS Institute, Cary, NC, 1990.

50
Given that the N of FARS cases is insufficient for statistically meaningful results, we strongly
believe, in this instance, that findings based on State data are more relevant and should be given
greater weight.
Table 35: Effectiveness of ESC as the Percentage Reduction in Fatal Single Vehicle Run-Off-
Road Crash Involvements Relative to the Control-Group Involvements - by ESC System Type -
for Passenger Cars
All run-off-
road
involvements
Control-
group
involvements
Risk
Ratio
ESC
reduction
Category 1: 2-channel ESC systems
Vehicles not equipped with
2-channel
56 56 1.000
Vehicles equipped with 2-
channel
16 41 0.390
61%
Category 2: 4-channel ESC systems
Vehicles not equipped with
4-channel
165 105 1.571
Vehicles equipped with 4-
channel
139 144 0.965
39%
Tables 36 shows not only the reduction in all single-vehicle run-off-road crashes – which consist
of mostly non-fatal involvements – in each selected State, but also the weighted mean of the
reductions in all States (similar to the calculation method used in Tables 30 and 31) – in
passenger cars for 2-channel and 4-channel ESC systems. To test for the significance of the
difference in effectiveness in six States, a four-dimensional CATMOD analysis was used. In
theory, a four-dimensional CATMOD analysis involves aggregating data from all the States,
using all possible combinations of the four variables in the model. However, this approach could
create biased results due to: (1) different crash-reporting thresholds among the States, (2)
variation of make-model mix from State to State, as well as (3) variation in the distribution of
crash types from State to State. Thus, to adjust for those biases, a CATMOD analysis was
performed on 6 x 4 x 2 table of State by ESC system by crash involvement. The dichotomous
dependent variable is ROR with values (= 1 for single vehicle run-off-road involvements; = 2 for
the control-group involvements). The independent variables are STATE (a categorical variable
with six categories: 1, 2, 3, 4, 5, and 6 for six States – Florida, Illinois, Kentucky, Missouri,
Pennsylvania, and Wisconsin, respectively), FOUR_CH (a dichotomous variable with values = 1
for 4-channel systems; = 2 for 2-channel systems), and ESC (another dichotomous variable with
values = 1 for vehicles with ESC: 2-channel or 4-channel; = 2 for vehicles without ESC). The
model included the following terms: 1) ROR*FOUR_CH, 2) ROR*ESC, 3) ROR*STATE, 4)
ROR*FOUR_CH*STATE, 5) ROR*ESC*STATE, and 6) ROR*FOUR_CH*ESC.
23
The chi-
square statistic for the ROR*FOUR_CH*ESC term was 4.69, which is statistically significant at
the 0.05 level but not significant at the 0.025 level. In other words, the difference in
23
The four-way interaction term is not included because we do not anticipate that the effectiveness gap between 4-
channel and 2-channel systems would vary from State to State.

51
effectiveness between the 2-channel and 4-channel systems – specifically the larger observed
reductions in single-vehicle run-off-road involvements with 4-channel systems versus the smaller
observed reductions with 2-channel systems – are statistically significant in the State data.
Table 36: Effectiveness of 2-Channel versus 4-Channel ESC Systems as the Percentage
Reduction in All Single-Vehicle Run-Off-Road Crashes in Passenger Cars – By State Run-
Off-Road Crash Reduction (%) in
Florida
Illinois
Missouri Kentucky Pennsylvania Wisconsin *Mean of
the
reductions
in 6 States
With 2-
channel
ESC
systems
0 49 31 37 50 11 30
With 4-
channel
ESC
systems
31 57 48 50 41 47 43
* indicates the weighted mean of the reductions in 6 States.
Another approach that we used to compare 2-channel and 4-channel systems is to pool crash
involvements (specifically single-vehicle run-off-roads and non-relevant involvements) from the
States and estimate the significance of the difference in the overall effectiveness estimate of the
two systems. Table 37 shows the sum of crash involvements from six States and the
effectiveness estimates for the two systems. Again, the 4-channel systems are more effective in
reducing single-vehicle run-off-road crashes than the 2-channel systems as shown by the 48
percent and 33 percent effectiveness, respectively. When the CATMOD procedure is applied to
the three-way table, the chi-square of the three-way interaction term is 5.41, which is statistically
significant not only at the 0.05 level but also at the 0.025 level. Regardless of how we assess the
statistical significance of the difference in the effects of the two ESC systems in the State data
analysis, the results from two different methods of analysis (non-parametric and parametric
approach) consistently showed that the 4-channel systems reduced more single-vehicle crashes
than the 2-channel systems.

52
Table 37: Effectiveness of ESC as the Percentage Reduction in Single-Vehicle Run-Off-Road
Crash Involvements Relative to the Control-Group Involvements from Six States - by ESC
System Type - for Passenger Cars
All run-off-
road
involvements
Control-
group
involvements
Risk
Ratio
ESC
reduction
Category 1: 2-channel ESC systems
Vehicles not equipped with
2-channel
437 3304 0.132
Vehicles equipped with 2-
channel
145 1638 0.089
33%
Category 2: 4-channel ESC systems
Vehicles not equipped with
4-channel
1399 8948 0.156
Vehicles equipped with 4-
channel
719 8905 0.081
48%
CONCLUSIONS
Based on the analysis results from the 2x2 contingency tables, ESC appears to be extremely
successful in reducing not only fatal crashes but also other crash involvements. Tables 38 and 39
summarize the effectiveness of ESC – as the percentage reduction in the ratios of relevant crash
involvements to non-relevant involvements (i.e., the control-group) – in passenger cars and
LTVs with ESC versus those without ESC, for certain crash involvements that are considered
relevant.
In Table 38, ESC reduced all fatal single-vehicle run-off-road crash involvements by 36 percent
in passenger cars and 70 percent in LTVs. The table also includes effectiveness estimates of
fatal single-vehicle crashes excluding pedestrian, bicycle, animal crashes for passenger cars and
LTVs – 36 percent and 63 percent, respectively. These results are similar to those in the 2004
study – which showed that ESC was effective in reducing fatal single-vehicle crashes by 30
percent in passenger cars and 63 percent in SUVs. The control group used in the 2004 study
included all multi-vehicle crash involvements, whereas this study used non-relevant
involvements – where the crash-involved vehicle was stopped, parked, traveled at a speed of less
than 10 mph, or non-culpable party in a multi-vehicle crash on a dry road – as the control group.
As mentioned in the 2004 study, using multi-vehicle crashes as the control group, when it is
possible that multi-vehicle crashes are being reduced by ESC, actually means that the true
effectiveness of ESC could be higher than what we had estimated in the 2004 study for fatal
single-vehicle crashes. Based on the results from both studies, we may conclude with confidence
that the effectiveness still hold for all fatal single-vehicle crashes especially for all run-off-road
involvements in passenger cars and LTVs. Furthermore, the logistic regression analysis results
showed that ESC reduced fatal run-off-road involvements by 54 percent for passenger cars and
68 percent for LTVs, controlling for certain external factors that could confound the effects of
ESC. Initially, the vehicle “age” effect was included in the regression analysis, but the effect
was not statistically significant even when only independent variables for ESC and vehicle age

53
were considered and other factors were not. Thus, this factor was not included in the final
regression model. While the regression results showed that the age of vehicles had no significant
effect on crash involvements (specifically fatal run-off-road involvements), it is important that
this factor be evaluated in future analyses as ESC equipped vehicles get older and its influence
on crash involvements might become more significant.
Moreover, in this study, we found that rollover involvements in fatal crashes decreased by 70
percent in passenger cars and 88 percent in LTVs. Hence, ESC is very effective in reducing
fatal single-vehicle run-off-road crashes and extremely beneficial in rollover involvements. The
reductions are statistically significant. Furthermore, multi-vehicle crash involvements were also
reduced – in passenger cars and in LTVs with ESC – as shown by the positive effectiveness of
19 percent (although not statistically significant) and 34 percent, respectively – Table 38. The
observed effects of ESC on pedestrian, bicycle, and animal crashes are not statistically
significant, and they are inconsistent – as evidenced by the negative 36 percent and negative 6
percent effectiveness for passenger cars and LTVs, respectively. If we excluded pedestrian,
bicycles, and animal crashes, ESC is very successful in reducing single-vehicle crashes – 36
percent for passenger cars and 63 percent for LTVs. The results are similar to those found in the
2004 study. Even with the inconsistent results for ESC in crashes that involved pedestrians,
bicycles, or animals, ESC is still highly effective in reducing all fatal crash involvements
(including the control-group involvements as well as other non-relevant involvements) by 14
percent in passenger cars and 28 percent in LTVs.
Table 38: Effectiveness of ESC as the Percentage Reduction in Certain Fatal Relevant Crash
Involvements in Passenger Cars and LTVs
Types of Crash
Involvement
Passenger Cars LTVs
Single-vehicle crashes*
36% 63%
All run-off-road
36% 70%
Rollover
70% 88%
Pedestrian/bicycle/animal -36% -6%
Culpable multi-vehicle 19%
34%
All crashes 14%
28%
* excludes pedestrian, bicycle, animal crashes.
Notes:
1) Bold – effect is statistically significant.
2) Plain type – effect is not statistically significant.
Table 39 shows the weighted mean of the effects of ESC in all selected States (California,
Florida, Illinois, Kentucky, Missouri, Pennsylvania, and Wisconsin) on certain relevant crash
involvements (which consist of mostly non-fatal crashes) in passenger cars and LTVs. The
notations listed in the table below are similar to those in Table 38. Similar to the results in the
fatal crash analysis, ESC is highly effective in reducing all single-vehicle run-off-road crashes,
especially rollovers. In fact, the reductions are 45 percent in passenger cars and 72 percent in
LTVs for all run-off-road crashes – and 64 percent and 85 percent, respectively, for rollovers.
Also, the observed reductions in single-vehicle crashes (not including pedestrian, bicycle, animal

54
crashes) for passenger cars and LTVs are 26 percent and 48 percent, respectively, which are
comparable (to some extent) to the results from the 2004 study (35 percent for passenger cars
and 67 percent for SUVs). The results for ESC-equipped vehicles in crashes that involved a
pedestrian, bicycle, or animal are inconsistent – as shown by the 26 percent and negative 11
percent effectiveness in passenger cars and LTVs, respectively. This contrasts with the fatal
crashes, where the results were less favorable for cars. Culpable multi-vehicle crash
involvements decreased by 13 percent in passenger cars and 16 percent in LTVs, and the
decreases are statistically significant. When we looked at all crash involvements, we found
significant reductions with ESC – 8 percent reduction in passenger cars and 10 percent reduction
in LTVs.
Table 39: Effectiveness of ESC as the Percentage Reduction in Certain Relevant Crash
Involvemetns in Passenger Cars and LTVs
Types of Crash
Involvement
*Passenger Cars *LTVs
Single-vehicle crashes**
26% 48%
All run-off-road
45% 72%
Rollover
64% 85%
Pedestrian/bicycle/animal
26%
-11%
Culpable multi-vehicle
13% 16%
All crashes
8% 10%
* indicates the weighted mean of the effectiveness estimates of 7 States.
** excludes pedestrian, bicycle, animal crashes.
Notes:
1) Bold – mean effect is statistically significant.
2) Plain type – mean effect is not statistically significant.
All in all, ESC significantly reduced single-vehicle crashes especially run-off-road and rollover
involvements. In all likelihood, ESC may also be helpful in reducing culpable involvements in
multi-vehicle crashes. At this time we do not have enough data for statistically meaningful
results on the effect (if any) of ESC on pedestrian, bicycle, and animal crashes. Thus, we will
continue to monitor the effect on those crashes in the future.
Although there is a fairly large variation in ESC effectiveness (possibly because the estimates
somewhat depend on the choice of the control group) between different studies (as previously
discussed in the “Background” Section), ESC is still highly effective in all studies. ESC is likely
to have the largest effect on crashes involving severe injuries. Minor crashes are less likely to be
rollovers. Thus, including a large number of damage only crashes or slight injury crashes in this
study would likely reduce the effectiveness of ESC. In other words, the effectiveness of ESC
may even be higher than estimated if the large number of damage-only crashes are excluded in
the analysis. Although the sample used in this study is based on mostly luxury vehicles, we
believe that ESC would still be highly effective across the entire on-road fleet based on the
results from other studies (specifically those in Europe) where a large population of various
vehicle classes were used in analyzing the effectiveness of ESC.
55
REFERENCES
Aga, M. and Okada, A. (2003) Analysis of Vehicle Stability Control (VSC)’s Effectiveness from
Accident Data, Paper Number 541, Proceedings of the 18
th
International Technical Conference
on the Enhanced Safety of Vehicles.
Agresti, A. (2002) Categorical Data Analysis, Wiley, New York, pp.16-25.
Allison, P.D. (1999) Logistic Regression Using the SAS System: Theory and Application, Cary,
NC: SAS Institute Inc., pp.82-83.
Dang, J. (2004) Preliminary Results Analyzing the Effectiveness of Electronic Stability Control
(ESC) Systems, NHTSA Evaluation Note No. DOT HS 809 790, Washington, DC.
Farmer, C. (2004) Effect of Electronic Stability Control on Automobile Crash Risk, Traffic
Injury Prevention, Vol 5, pp. 317-325.
Green, P. and Woodrooffe, J. (2006) The Effectiveness of Electronic Stability Control on Motor
Vehicle Crash Prevention, Report Number UMTRI-2006-12, University of Michigan
Transportation Research Institute, Ann Arbor, MI.
Handbook of Probability and Statistics with Tables, Second Edition, McGraw-Hill, Inc., USA,
1970, pp. 244-245.
Lie, A., Tingvall, C., Krafft, M., and Kullgren, A. (2006) The Effectiveness of ESC (Electronic
Stability Control) in Reducing Real Life Crashes and Injuries, Traffic Injury Prevention, Vol 7,
pp. 38-43.
Lie, A., Tingvall, C., Krafft, M., and Kullgren, A. (2004) The Effectiveness of ESP (Electronic
Stability Program) in Reducing Real Life Accidents, Traffic Injury Prevention, Vol 5, pp. 37-41.
Morgan, C. (2001) The Effectiveness of Retroreflective Tape on Heavy Trailers, NHTSA
Technical Report No. DOT HS 809 222, Washington, DC, pp. 29-37.
SAS/STAT
®
User’s Guide, Vol. 1, Version 6, 4
th
Ed., SAS Institute, Cary, NC, 1990.
Traffic Safety Facts, 2004, NHTSA Technical Report No. DOT HS 809 919, Washington, DC,
pp.19-20.
